pour augmenter la réactivité augmente les rates, ajoute de l'expo pour conserver la précision du pilotage
tu peut aussi augmenter le D cela te permet de monter le P
ZMR 250,RS2205 CC3D BF 2Khz "frankenquad"
X6R, F60 Kiss FC 4Khz
X5R, Emax Rs 2306 Revolt V2 32Khz Rf1 RC12
X210, F60 Revolt V2 32Khz RF1 RC12 //BF 3
Nano 130, RS 1306 CC3D sous CF 2Khz
F450 Hexa Sparky 2 sous LP
Imprimante 3D Prusia i3
on continue l'apprentissage du pilotage en accro , aujourd'hui vol bas avec passage sous des branches d'arbre , et ensuite vol éloigné pour tester le matos vidéo.
ça commence à rentré , je prend du plaisir . " onclick="window.open(this.href);return false;
Pas de soucis pour le toutou , il remplace le buzzer en cas de crash , il se couche devant le quad et il m'attend.
Pour les vibrations , je pense que cela viens d'une hélice que j'avais plié en début de session , mais que je n'est pas changé. Je vérifierai quand même au prochain vol
test d'un script superview pour xiomi YI. je suis déçu , je trouve l'image sombre et trop aplatit.
Vous en pensez quoi ? " onclick="window.open(this.href);return false;
C'est bien je trouve, la luminosité et le contraste, de toute façon il faut toujours le retoucher plus moins.
Franchement, au prix d'une YI, c'est vraiment bien
, je l'ai pas retouché encore , c'est originale , je commence à me faire à l'image plus plate , ce week end je teste les retouches , comme il pleut pas de vol
nouveau chassis et premier vol avec le Realac x210.Çà change du ZMR 250 , bien plus réactif je trouve.
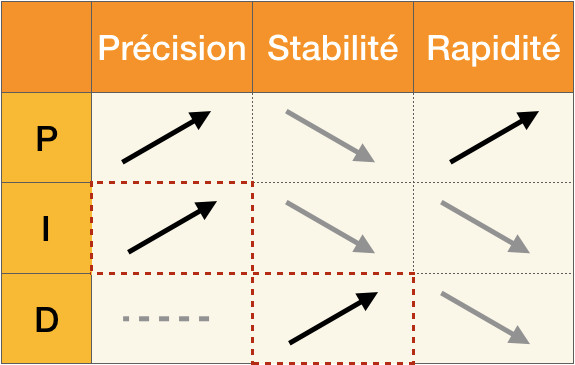
Il me reste à travailler les PID et ensuite les figure en freestyle .
Pour le superwiev , finalement j'accroche bien.