
Passionné dans l’informatique , robotique , et drone
J’ai conçu 2 robots avec le module Arduino et Roméo , un robot qui évite les obstacle , et le 2eme robot ( il n’est pas fini ) qui suit les mouvements , du genre je mets ma main devant le robot et je recule ma mains le robot avance , j’avance ma main, le robot recule.
Je possède déjà un drone, pour débutant, c’est un FY530

Je compte me construire un Quadricoptère a partir du châssis ZMR250.
Avec les pièces suivantes que j’ai acheté:
Châssis: QAV250 250mm Mini Frame Kit FPV Quadricoptère fibre de carbone

Hélice: Gemfan 5×3 pouces en plastique 5030 Hélice CW / CCW Pour 240 250 Cadre

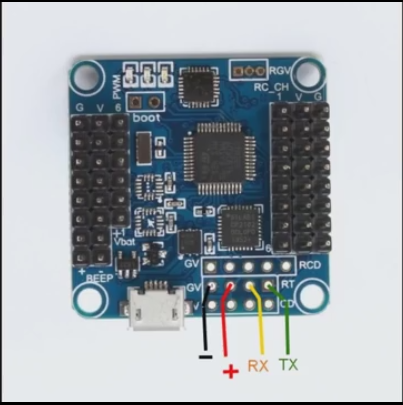
Carte mère: Flip32 Flight Controller Avec 32 bits STM32 10Dof

Bluetooth: MWC MultiWii Bluetooth Paramètre débogage Module programmeur

Plaque distribution zmr/qav:

Contrôleur de vol anti-vibration: CC3D Contrôleur de vol anti-vibration Plate Mini APM Compatible

Buzer: 7.4V -11.1V 2S-3S Lipo RC Batterie basse tension Indicateur d’alarme

4 moteurs DYS BE1806 – 2300kv

4 ESC EMAX SimonK series 12A

Batterie Lipo 3S 1300mah

Radio commande 2.4Ghz FlySky FS-TH9XB Mode 2

Chargeur Lipo Imax B6:
Transfo pour chargeur Lipo Imax B6:
Des câbles servo:
Des rallonges de câbles servo (ça peut être utile):
De la gaine thermo (pour protéger les soudures):
Des connecteurs banane ( a voir ):
j'ai monté le châssi du drone , j’ai bien galéré, temps du montage 28 minute.
Voici quelque photos du châssis monté:


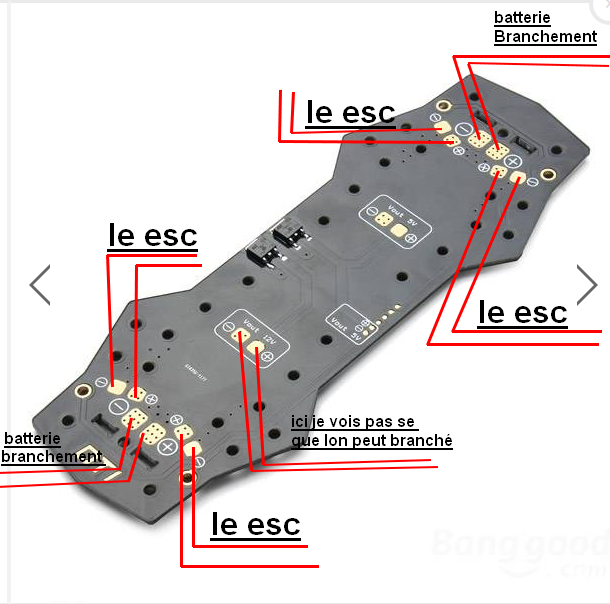
j’ai reçue ma plaque de distribution celle-ci:

La batterie je la branche bien sur le 12v indiqué sur la plaque de distribution c’est bien ça ??? et la naze32 serra alimenté par un + d’un des esc si j’ai compris???






{kind=link}