Pour information, je suis aller dans le magasin de modélisme près de chez moi et quand je lui aie demandé des visses et des rondelles anti-vibrations il m'a dit qu'il n'en avait pas et m'a même demandé si ça existait (oui oui je vous rassure ça existe).
Donc j'ai acheté des o-ring en espérant que ça fonction mais sans succès.
Je vais donc utiliser la technique du blocage de mes visses, enfaite je condamne seulement le PBD car la naze32 est tenue sur les entretoise avec des boulons qui eux peuvent être enlevés.
Ensuite j'ai fait des test hier soir pour trouver le juste milieu avec la vis (pas encore mis le loctite j'attends pour faire la vidéo). et bien c'est assez simple, j'ai procédé comme ça:
- Serrage normal (donc au max).
- puis je desserre de un tour les vis. (appuyer sur l'entretoise pour voir l'écart entre le chassis et la vis)
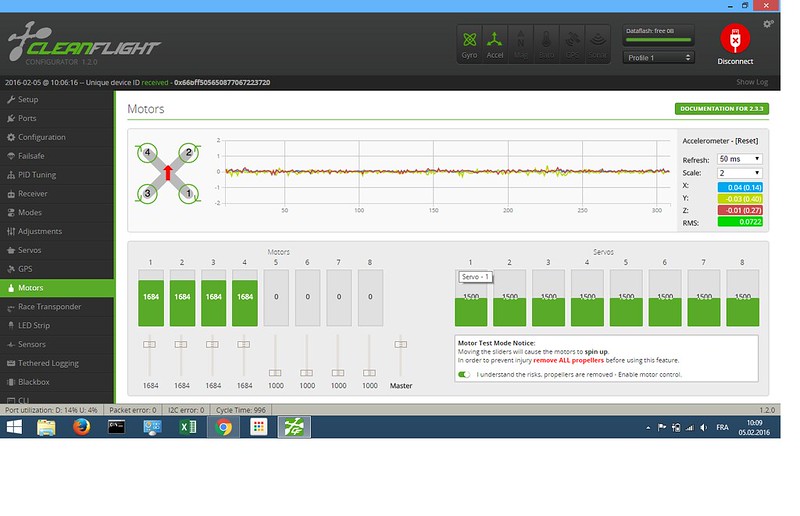
- je test sur CF
- je continue l'opération jusqu'à ce que les vibrations n'aie plus d'influencent sur ma carte.
- je mesure l'écart.
- je dévisse et là je mets le loctite. (je ferai ça dans la vidéo)
Remarque: j'ai pu constater une chose, quand on est sur CF et qu'on calibre les acc dans setup, une fois finie en haut a gauche dans l'image ou il y a le drone les informations de degrés pour yaw/pitch/roll oscillent sans-cesse meme sans que les moteurs tournent et ça quand bien souvent j'avais le problème de dérive.
Après avoir trouvé le juste milieu pour le serrage des visses, je calibre une nouvelle fois les acc et la je constate que même sans moteur activé, alors les degrés restent bien fixent à 0.
J'ai en plus tout essayé, taper sur le bureau, cliquer avec la souris etc. et bien ils ne bougent pas ou presque pas contrairement à la fois ou j'ai des problèmes de dérive.
Dernière remarque si certains veulent essayer de régler chez-eux avant que je fasse la vidéo, une fois vaut acc calibré, contrôler les points milieu de votre radio commande et ajustez au besoin pourquoi? et bien une fois le problème réglé de mon côté, pitch/roll étaient très stable (plus de dérive) par une légère dérive en yaw et cette dérive venait que mon point milieu avait changé, il était passé de 1500 à 1496 voir 1495, d'ou la dérive sur yaw. Une fois réglé tout était bien stable et j'ai ENFIN pu régler mes PID et voler normalement avec mon drone, (j'ai vraiment pris mon pied) 1er vol sans soucis (ah si un arbre donc 4 hélices) mais sinon il était sur des rails.
A savoir aussi que sur les petit chassis comme le QAV210, il y aura toujours une légère dérive très acceptable car on ne peut pas supprimer les vibrations à 100% mais elle est très très faible et ne dérange pas le vol.
Voilà à bientôt avec la vidéo.