Wovokaa a écrit :David a écrit :Je ne vois pas comment MP pourrais stabiliser le Quad en fonction de la masse (Gaz/Pitch/Roll) ?
---------------------------------------------
Je me trompe ?
Oui et non

Ce serait plutôt l'AutoTune qui adapte des réglages en fonction des réactions du multi sous certaines conditions/configs.
Cela dit, moi j'aime bien l'AutoTrim, ainsi que la "danse de l'indien", ça a toujours très bien fonctionné sur mon CX-20, jamais eu aucun souci de ce coté là [yahoo.gif]
même si chris et wovokaa on presque tout dit
ma vision des choses est que :
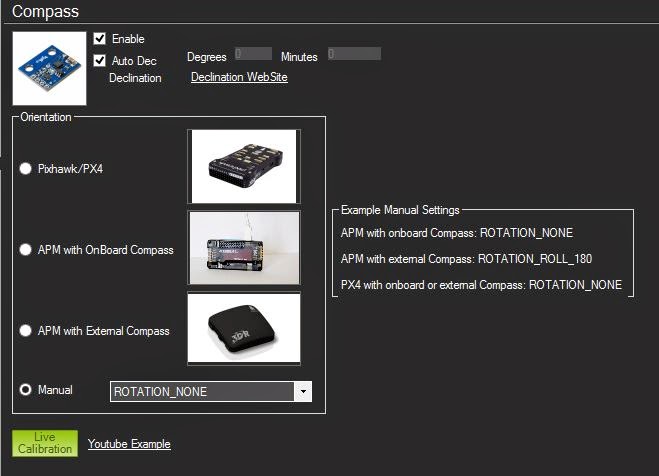
quand vous calibrez l'accelérometre sous MP, vous indiquez exactement dans qu'elle position le drone doit être pour être droit
une fois ceci fait, on admet qu'elle soit faite à la perfection dans un monde parfait : vous obtenez un drone alors parfaitement droit, peu importe un changement de place des masses ou d'une gimbal en titane
car l'accéléromètre c'est son taf, va gérer les moteurs pour vous (enfin pas directement on s'comprend), pour garder le drone à plat quoi qu'il arrive (si vous ne toucher à rien) et il fait ça en ajustant et compensant en permanence les axes
mais comme tout n'est jamais parfait dans ce monde, il y a le réglage des trim manuel sur la RC pour compenser et mettre le drone à hauteur, droit, (ce qui donne un auto-trim manuel)
une fois vos trim manuel ajusté, vous pouvez les sauvegarder sous MP comme point de départ (save-trim), ou les réajuster à la main (ou refaire une calibration complète si besoin)
il y a 5 façon qui existe de regler les trim AHRS_TRIM_X et AHRS_TRIM_Y et mettre le drone à plat:
en calibrant sous MP directement
à la main sur la RC avec les 4 boutons blanc (mais là ca ne reste que dans la RC)
à la main sur la RC, puis les sauvegarder de votre RC vers l'APM (save-trim) attribuer sur un switch (je ne sais pas sous qu'elle Version de firmware)
en automatique avec auto-trim qui fais exactement la même chose, mais vous donne 25" pour faire un statio correct et enregistre les trim une fois à terre
en manuel sur MP avec l'aide de l'horizon artificiel en changeant AHRS_TRIM_X et AHRS_TRIM_Y à la main
et une 6eme que crhis42 va bien me trouver avec la télémétrie ?

corrigé moi si je me trompe
donc pour moi, il y a en tout cas de quoi faire sans l'auto-trim, pour ne pas conseiller l'auto-trim au débutant à partir du moment ou même seulement 3 personnes sur 100 on crashé le drone avec cette méthode ! après si vous vous appelez wovokaa vous faites évidement comme bon vous semble car vous pouvez vous le permettre

les petit défauts qui oblige à re-regler un peu les trim, je dirais un choc même léger, l'apm qui a bougé, coque déformé, les vibrations, les moteurs pas forcement parfaitement droit, les stick de la RC fatigué, déséquilibre trop prononcé, ou simplement une calibration sous MP qui n’était pas au micromètre
-c'est juste une liste de défauts potentiel qui me paraissent crédible-
"""ma théorie actuel du pourquoi certain crash et d'autre pas en auto-trim, c'est que en auto-trim je pense qu'il remet tout à zero pour le décollage. c'est à dire
qu'il va appliquer une pousser identique sur chaque moteur, et attendre que vous fassiez le boulot habituel des accéléro à leurs place... du coup si le drone est mal équilibré et/ou les accéléromètres ne sont pas droit avec un mauvais réglage ou un APM de travers le drone part dans le décors, car vous aurez du mal à compenser tout les axes qui sont mal réglé au 1er coup d'essais""""
cela reste mon hypothèse en attendant une autre meilleurs










{kind=link}
{kind=link}