Suite au crash de mon S500X8 et en attendant de le remonter (ou non), je me suis lancé dans la construction d'un quadricopter avec cette fois un châssis fait maison en tube d'aluminium carré.
Pourquoi me direz-vous, simplement parce que le S500X8 m'ayant couté assez cher ma cher et tendre n'a pas beaucoup apprécié voir ce gros billet tombé en mille morceau (bien qu'un billet, même un gros ne s'écraserait pas). Bref, remettre de l'argent pour réparer est un peu compromis pour le moment il me fallait donc choisir entre mettre de coté ou faire autre chose.
Dans mon malheur j'ai quand même un certain nombre de pièces qui ont survécus et qui permettent d'envisagé le montage d'un engin intérimaire (ou pas).
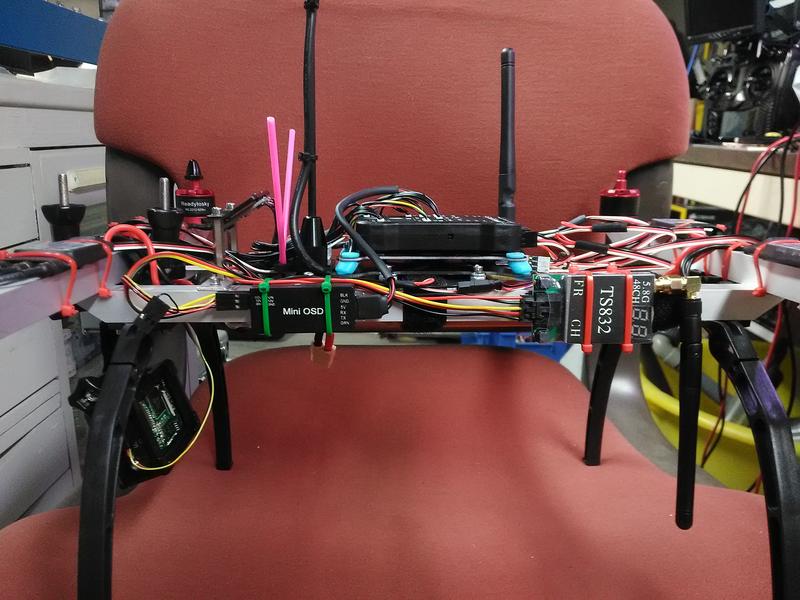
Le choix de faire un châssis en aluminium et en forme de H est un choix technique pour sa simplicité et son coût réduit. Les deux bouts de profilés m'ont couté 10€ et je peux en refaire facilement en cas de pépin.
Il y aura malgré tout quelques achats à faire comme des hélices carbone (faut bien tirer les leçons d'un crash) et peut être une camera pour avoir un retour vidéo.
Passons aux photos :
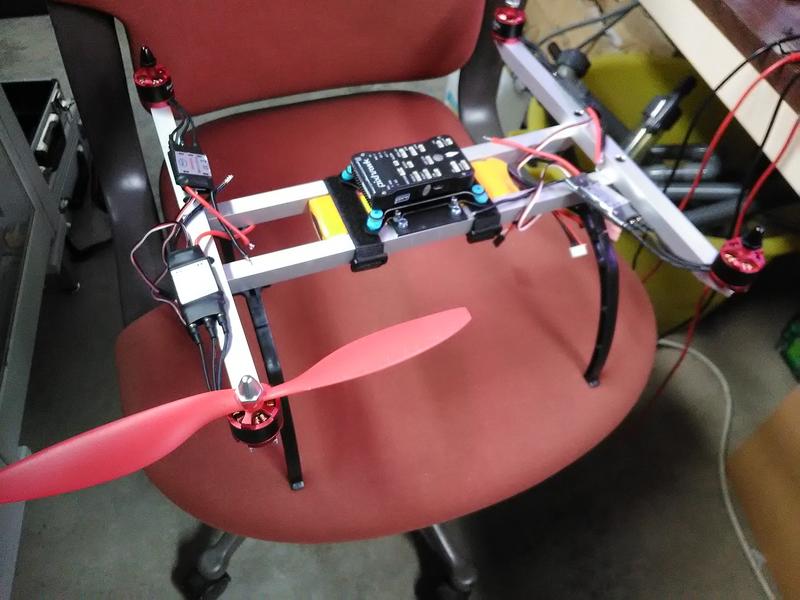
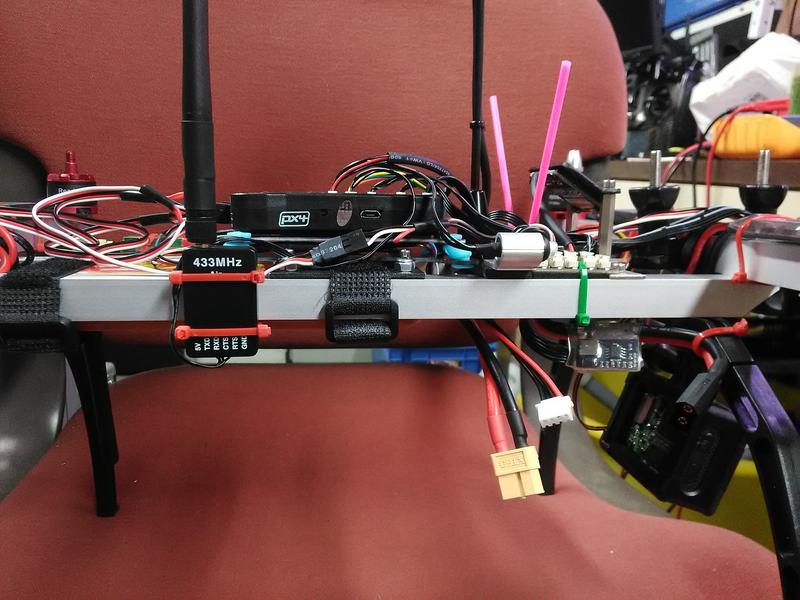
Le montage est bien avancé, le châssis en lui même est finit, il y aura sans doute quelques trous de fixation à faire. Une petite après-midi de travail.

J'ai réutilisé les pieds qui était dans le kit du S500, ils permettent de donner un peu de hauteur (pratique pour éviter les herbes) et laisse envisagé l'installation d'une caméra.
La batterie prend place au centre entre les deux profilés, elle pourra être déplacé pour ajuster le centre de gravité.

Les tubes sont coupés en biais pour laisser l'accès aux fixations des moteurs.

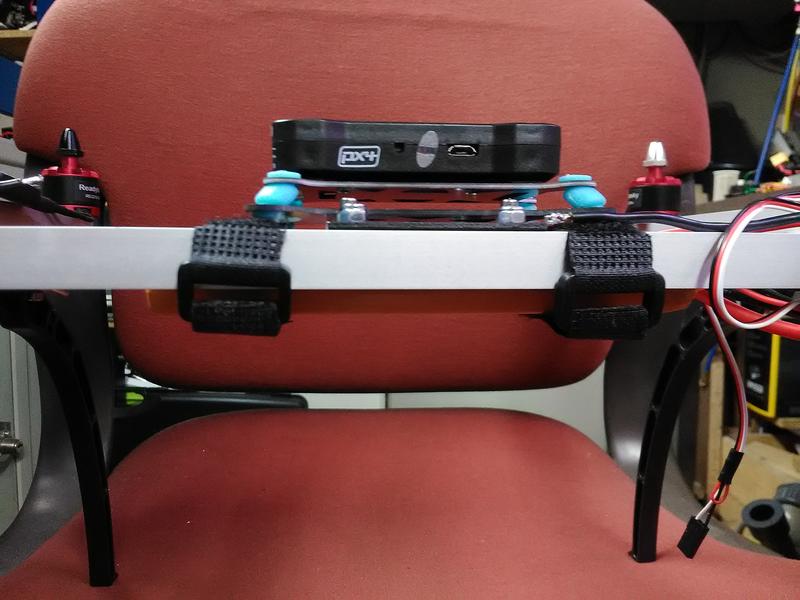
Les tubes sont assemblés avec des vis et des écrous frein.

La rigidité de l'assemblage réside dans le serrage direct entre les deux parois des tubes et non à travers, cela permet un serrage important sans déformation. Il faut bien sur réaliser des trous pour passer et serrer les vis.
La plaque centrale sur laquelle est monté le contrôleur de vol est fixé aux tubes de la même façon et finit le verrouillage de l'ensemble.
Résultat, c'est très rigide (j'en suis encore surpris) et relativement léger.
Suite du programme, mise en place de la distribution de puissance et le reste roulera tout seul