Salut à tous.
Essayant de peaufiner mes réglages sous cleanflight, un truc me gène:
Sur des mouvements rapides sur le roll et le pitch, j'ai des oscillations au retour à l'horizontal.
Ces mouvements sont particulièrement sensibles en mode angles, un peu moins en horizon et encore un peu moins en acro.
Mais ça reste quand meme sensible sur tous les autres modes.
En stationnaire, pas d'oscillation.
Par contre, si je baisse fort le throttle, ça oscille pas mal durant la descente.
Le comportement est nettement amélioré avec le air mode, mais pas parfait.
Je bute sur le/les paramètres à modifier, un coup de main serait utile.
Des idées?
oscillations sur translations rapides.
Modérateur : Dehas
-
kkwete

- Hexacopter
- Messages : 324
- Enregistré le : dim. 28 juin 2015 17:49
- Réputation : 1
-
Ludow

- Quadricopter
- Messages : 262
- Enregistré le : dim. 16 févr. 2014 19:25
- Réputation : 0
- Localisation : Dunkerque
Re: oscillations sur translations rapides.
Un peu normal qu'il soit sensible en mode retour à plat . Faut modifié le " level" .
Quand il descend , il rentre dans ses propres turbulences . Normal qu'il chahute mais " pas mal " me parait un peu beaucoup .
Tu as quoi en looptime ?
Et t'as quoi comme config d'abord ?
Quand il descend , il rentre dans ses propres turbulences . Normal qu'il chahute mais " pas mal " me parait un peu beaucoup .
Tu as quoi en looptime ?
Et t'as quoi comme config d'abord ?
-
kkwete
- Hexacopter
- Messages : 324
- Enregistré le : dim. 28 juin 2015 17:49
- Réputation : 1
Re: oscillations sur translations rapides.
J'ai une config somme toute basique, et en partie "cheap", c'est voulu:
Moteurs BYS 1806 2300kv, esc Emax 12A simonK series, naze32 rev5 sous cleanflight 1.13.0, chassis full carbone diatone, hélices gemfan 5045, kit fpv eachine camera et transmetteur qui se branche sur la prise d'équilibrage de la lipo, micro minimOSD en cours de livraison, lipo turnigy compact 1500mAh en 3S.
Poids total en ordre de vol: 440gr, lipo incluse donc.
Compte tenu poids, il est très réactif, même pour du 3S.
Le "pas mal" est en effet très subjectif...!Je ne sais pas à quoi comparer...
Moteurs BYS 1806 2300kv, esc Emax 12A simonK series, naze32 rev5 sous cleanflight 1.13.0, chassis full carbone diatone, hélices gemfan 5045, kit fpv eachine camera et transmetteur qui se branche sur la prise d'équilibrage de la lipo, micro minimOSD en cours de livraison, lipo turnigy compact 1500mAh en 3S.
Poids total en ordre de vol: 440gr, lipo incluse donc.
Compte tenu poids, il est très réactif, même pour du 3S.
Le "pas mal" est en effet très subjectif...!Je ne sais pas à quoi comparer...
-
Ludow
- Quadricopter
- Messages : 262
- Enregistré le : dim. 16 févr. 2014 19:25
- Réputation : 0
- Localisation : Dunkerque
Re: oscillations sur translations rapides.
Je ne mets pas du cher non plus .Moteurs, esc que du DYS .
Tes esc , ce sont des vrais SimonK ou la fameuse Simon Serie de chez Emax .
Tu ne m'as pas donné le looptime de ta carte . Tu ne dois pas y avoir toucher . Dans un premier temps , je baisserai le looptime à 2500 voir 2000 .
Tes esc , ce sont des vrais SimonK ou la fameuse Simon Serie de chez Emax .
Tu ne m'as pas donné le looptime de ta carte . Tu ne dois pas y avoir toucher . Dans un premier temps , je baisserai le looptime à 2500 voir 2000 .
-
kkwete
- Hexacopter
- Messages : 324
- Enregistré le : dim. 28 juin 2015 17:49
- Réputation : 1
Re: oscillations sur translations rapides.
rectification:
en effet, ceux que j'avais avant c'etait bien des EMAX 12A SimonK series, donc pas de vrais simonK.
Je les ai donné, et j'ai ceux la actuellement: Rctimer 12a SimonK brushless trouvables ici:
http://www.banggood.com/fr/RCTimer-12A- ... 80201209NS" onclick="window.open(this.href);return false;
Je n'ai effectivement pas touché au looptime, ca va apporter un plus?
en effet, ceux que j'avais avant c'etait bien des EMAX 12A SimonK series, donc pas de vrais simonK.
Je les ai donné, et j'ai ceux la actuellement: Rctimer 12a SimonK brushless trouvables ici:
http://www.banggood.com/fr/RCTimer-12A- ... 80201209NS" onclick="window.open(this.href);return false;
Je n'ai effectivement pas touché au looptime, ca va apporter un plus?
-
Ludow
- Quadricopter
- Messages : 262
- Enregistré le : dim. 16 févr. 2014 19:25
- Réputation : 0
- Localisation : Dunkerque
Re: oscillations sur translations rapides.
Le looptime c'est la fréquence de rafraîchissement de la carte . Plus le looptime sera bas , plus la carte et donc le multi va coller à la réalité .Il chahutera moins quand il tombera dans ses propres turbulences .
Avec Cleanflight , j'ai baissé mon looptime progressivement ( en 3 étapes ) à 2500 , 2000 et je suis même allé jusque 1500 .
Mais ce n'est pas parce que tu vas baisser le looptime , que tu ne devras pas régler les PID , avec modération bien sûr .
Tant qu'on y est , la commande CLI est : " set looptime = ta valeur " ... et le "save" qui faire bien .
Avec Cleanflight , j'ai baissé mon looptime progressivement ( en 3 étapes ) à 2500 , 2000 et je suis même allé jusque 1500 .
Mais ce n'est pas parce que tu vas baisser le looptime , que tu ne devras pas régler les PID , avec modération bien sûr .
Tant qu'on y est , la commande CLI est : " set looptime = ta valeur " ... et le "save" qui faire bien .
-
kkwete
- Hexacopter
- Messages : 324
- Enregistré le : dim. 28 juin 2015 17:49
- Réputation : 1
Re: oscillations sur translations rapides.
Merci bien!
Je vais tester.
Au passage, comment connaitre son looptime actuel?
Et comment savoir comment on a atteint la valur limite à ne pas dépasser?
Je vais tester.
Au passage, comment connaitre son looptime actuel?
Et comment savoir comment on a atteint la valur limite à ne pas dépasser?
-
Ludow
- Quadricopter
- Messages : 262
- Enregistré le : dim. 16 févr. 2014 19:25
- Réputation : 0
- Localisation : Dunkerque
Re: oscillations sur translations rapides.
C'est écrit tout en bas de l'écran vers la gauche et nous l'avons sous le nez en permanence qu'on finit par ne plus le voir :

Tu peux aussi le modifier dans le GUI( c'est pour quand on est allergique au CLI ) , dans l'onglet Configuration et System configuration :
) , dans l'onglet Configuration et System configuration :
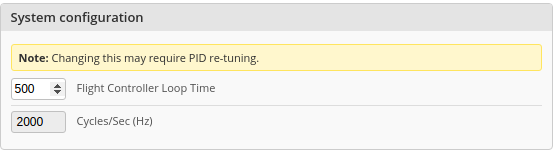
Dans mon cas , mon looptime ( cycle time ) est baissé à 500 parce que j 'utilise Betaflight et que par défaut il me met le looptime à 500 . Betaflight n'utilise pas le même algorithme , ni les mêmes filtres que Cleanflight . Cette valeur dépend de la puce qui équipe nos FC . J'ai une F3 ( SpracinF3 pas chère ) , du firmware supporté par tes esc (SimonK ou BlHeli et, Oneshot 125 ou Oneshot 42 ou Multishot ) et bien souvent des valeurs par défaut proposés par les firmwares tels que les Cleanflight/Betaflight .
Comment savoir jusqu'où on peut baisser son looptime ? Et bien quand ta machine va au tapis . En fait je ne sais pas , mais si tu veux faire le betatesteur ...Tiens nous au !!!
!!!
Tu peux aussi le modifier dans le GUI( c'est pour quand on est allergique au CLI
Dans mon cas , mon looptime ( cycle time ) est baissé à 500 parce que j 'utilise Betaflight et que par défaut il me met le looptime à 500 . Betaflight n'utilise pas le même algorithme , ni les mêmes filtres que Cleanflight . Cette valeur dépend de la puce qui équipe nos FC . J'ai une F3 ( SpracinF3 pas chère ) , du firmware supporté par tes esc (SimonK ou BlHeli et, Oneshot 125 ou Oneshot 42 ou Multishot ) et bien souvent des valeurs par défaut proposés par les firmwares tels que les Cleanflight/Betaflight .
Comment savoir jusqu'où on peut baisser son looptime ? Et bien quand ta machine va au tapis . En fait je ne sais pas , mais si tu veux faire le betatesteur ...Tiens nous au
!!!-
kkwete
- Hexacopter
- Messages : 324
- Enregistré le : dim. 28 juin 2015 17:49
- Réputation : 1
Re: oscillations sur translations rapides.
ah nickel, en effet, j'avais vu cette valeur, sans savoir ce qu'elle représentait.
Donc, je suis à 1000 par défaut.
D'après toi, je devrais la modifier?
Donc, je suis à 1000 par défaut.
D'après toi, je devrais la modifier?
-
Ludow
- Quadricopter
- Messages : 262
- Enregistré le : dim. 16 févr. 2014 19:25
- Réputation : 0
- Localisation : Dunkerque
Re: oscillations sur translations rapides.
1000 par défaut c'est la valeur de Betaflight avec une Naze première génération à puce F1.
Tu tournes avec quel firmware ?
Tu tournes avec quel firmware ?
-
kkwete
- Hexacopter
- Messages : 324
- Enregistré le : dim. 28 juin 2015 17:49
- Réputation : 1
-
Ludow
- Quadricopter
- Messages : 262
- Enregistré le : dim. 16 févr. 2014 19:25
- Réputation : 0
- Localisation : Dunkerque
Re: oscillations sur translations rapides.
OK alors Dominic Clifton s'est aligné avec Boris .
Bon . Ne touche pas à cette valeur .
Et ne vole plus en mode Angle ou Horizon , tu n'auras plus d’oscillation quand il se remet à plat .
Mais la variable qui diminue ce type d'oscilations est le " level " .
Bon . Ne touche pas à cette valeur .
Et ne vole plus en mode Angle ou Horizon , tu n'auras plus d’oscillation quand il se remet à plat .
Mais la variable qui diminue ce type d'oscilations est le " level " .
-
kkwete
- Hexacopter
- Messages : 324
- Enregistré le : dim. 28 juin 2015 17:49
- Réputation : 1
Re: oscillations sur translations rapides.
J'attendais ce type de réponse!
Mais je dois reconnaitre que j'ai du mal en acro avec le vol à vue.
Peut etre qu'en FPV, c'est plus simple car intuitif, mais sinon, je trouve ça galère!
Je pensais aussi à modifier les PID, mais c'est pas simple, meme apres avoir lu quantité de tutos à ce sujet.
Je pensais donc essayer Gtune.
Cette procédure doit se faire en acro?
Si les PID sont modifiés, cela modifie t il le comportement dans les autres modes de vol?
Mais je dois reconnaitre que j'ai du mal en acro avec le vol à vue.
Peut etre qu'en FPV, c'est plus simple car intuitif, mais sinon, je trouve ça galère!
Je pensais aussi à modifier les PID, mais c'est pas simple, meme apres avoir lu quantité de tutos à ce sujet.
Je pensais donc essayer Gtune.
Cette procédure doit se faire en acro?
Si les PID sont modifiés, cela modifie t il le comportement dans les autres modes de vol?
-
kkwete
- Hexacopter
- Messages : 324
- Enregistré le : dim. 28 juin 2015 17:49
- Réputation : 1
Re: oscillations sur translations rapides.
Je vais poser une question spécifique sur Gtune, je ne sais pas si c'est un système utile ou pas.