Page 1 sur 1
CC3d Mixer Editor [Résolu]
Posté : mar. 5 janv. 2016 18:45
par Katana
Bonjour à tous,
dans le mixer editor de la CC3d sous openpilot, je n'ai pas compris pourquoi les valeurs de mixage sont soit 64 soit 127 et uniquement ces deux valeurs
On devrait passer par des valeurs intermédiaires en fonction des angles
Merci et à bientôt
Re: CC3d Mixer Editor
Posté : mar. 5 janv. 2016 19:22
par f5soh
Les angles de quoi ?
Regardes un Octo ou un Hex si les valeurs sont toujours à 64 ou 127....
Re: CC3d Mixer Editor
Posté : mer. 6 janv. 2016 06:34
par Katana
Bonjour f5soh,
j'ai regardé, et les valeurs sont toujours à 64 ou 127 quelque soit le chassis Hex Octo Quad, etc...
Re: CC3d Mixer Editor
Posté : jeu. 7 janv. 2016 15:37
par f5soh
Bonjour,
A priori il faut regarder un peu mieux avec l'octo.
La plupart des mixages d'OpenPilot / LibrePilot suivent la méthode de décrite ici:
http://wiki.paparazziuav.org/wiki/RotorcraftMixing" onclick="window.open(this.href);return false;
D'autres résultats ici:
http://wiki.paparazziuav.org/wiki/Rotor ... figuration" onclick="window.open(this.href);return false;
Laurent
Re: CC3d Mixer Editor
Posté : ven. 8 janv. 2016 14:53
par Katana
Merci Laurent,
c'est très intéressant, je vais prendre le temps de calculer tout cela afin de le confronter à mon calcul.
Par contre ma question première est toujours la même, pourquoi dans open pilot, les valeurs sont 0, 53, 65, et 127 et pas d'autres?
Re: CC3d Mixer Editor
Posté : ven. 8 janv. 2016 15:49
par f5soh
Ces valeurs par défaut correspondent aux résultats des pages mentionnées ci-dessus.
Dans tous les réglages de base, les châssis sont symétriques. Dans le cas contraire, les résultats deviennent un peu plus exotiques par exemple avec un hexa ayant un écartement plus important des moteurs à l'avant et resserré à l'arrière.
La méthode de calcul fait en sorte que ce soit équilibré sur les trois axes et le total.
Là-dessus viennent s'ajouter les valeurs de mixage Roll/Pitch avec les curseurs...
Re: CC3d Mixer Editor [Résolu]
Posté : ven. 8 janv. 2016 18:43
par Katana
Re,
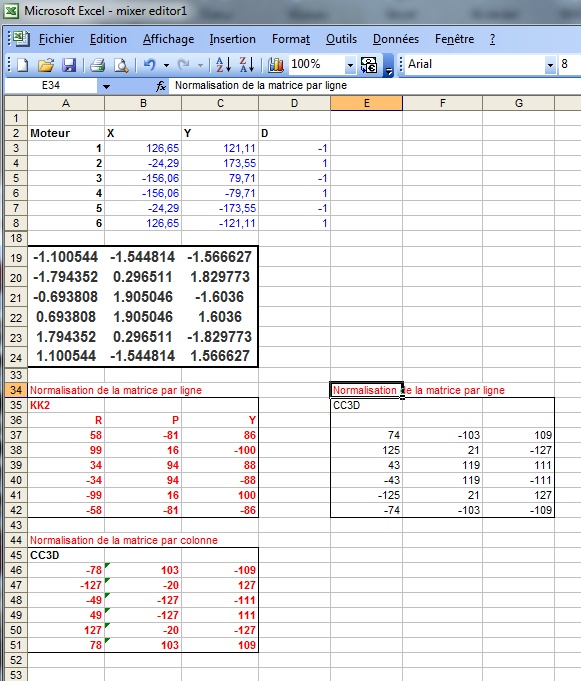
J'avais bien compris, et j'ai maintenant compris le pourquoi des valeurs de la CC3D par rapport à la KK2
La KK2 fait une normalisation de la matrice par ligne sur Roll et Pitch et par colonne sur Yaw
La CC3D le par colonne pour Roll Pitch et Yaw
Dans le cas des chassis symétriques cela fait une différence, mais beaucoup moins avec une config comme la mienne.
Les valeurs sont vraiment très proches
Je viens d'essayer l'appareil dans mon jardin, et miracle, il n'a plus de micro secousses (comme si il y avait trop de gain).
Je pense que la config est carrée maintenant, je vais donc pouvoir régler ses PIDs
Je vais l'essayer au terrain avec sa KK2 dimanche, je te tiens au jus.
Merci encore