Nouvelle télémétrie pour taranis ardupilot
Posté : dim. 11 mars 2018 13:08
Bonjour a tous 
nouvelle télémétrie bien sympa et complète pour taranis x9d / x9d+/x9e et q x7 crée par Alex un italien du coté de Venise
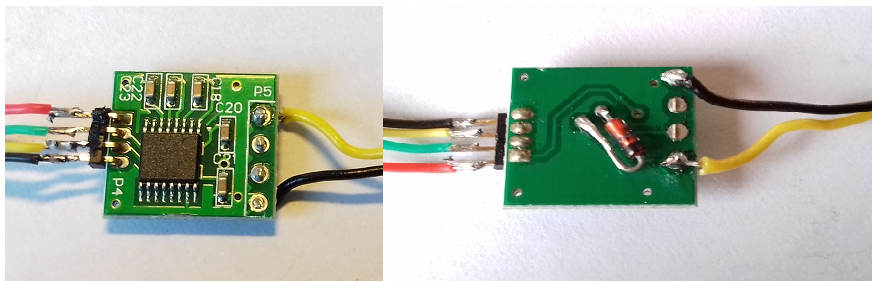
qui fonctionne avec un ful-1 et Mini RS232 To TTL Converter
Nécessite OpenTX 2.2 et une version récente d'arducoper, arduplane ou rover.
Fonctionne avec arducopter ardurover arduplane et quadplane
Testé sur un pixracer avec copter 3.5.3 et sur un clone pixhawk avec copter 3.5.4 et 3.5.5
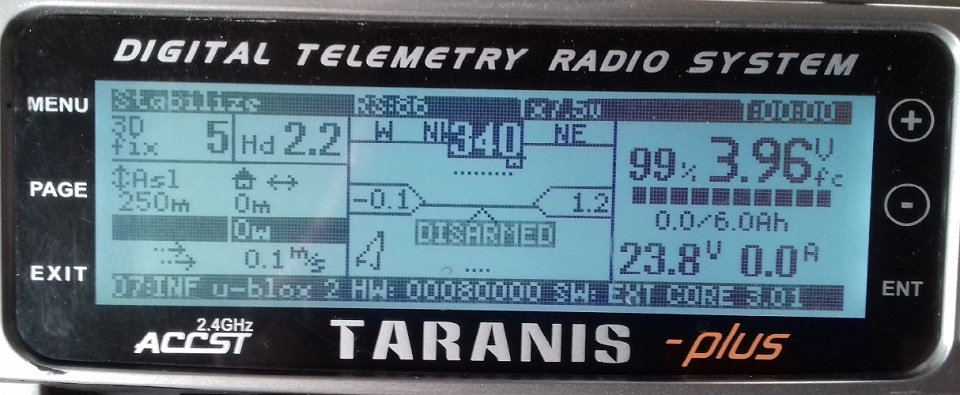
TARANIS X9D ET X9D+ X9E
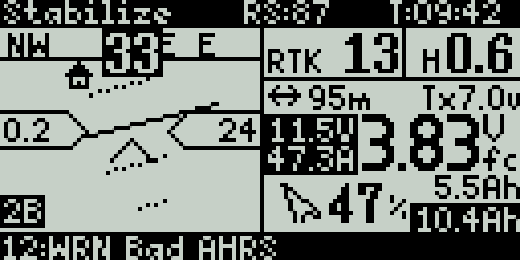
TARANIS Q X7
lLien GITHUB https://github.com/yaapu/FrskyTelemetryScript
TELEMETRIE en Anglais Italien et français (sound)
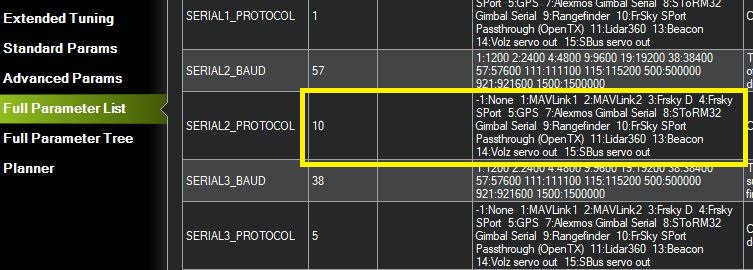
passer le serial protocole s-port en (10) 10:FrSky SPort Passthrough (OpenTX)
Script de télémétrie Yaapu Frsky
Un script de télémétrie à base de lua pour la radio Taranis X9D +, X9E et X7 en utilisant le protocole frsky passthrough.
Le script supporte tous les paquets de télémétrie DIY 0x5000 envoyés par Ardupilot [frsky passthrough library library] (https://github.com/ArduPilot/ardupilot/ ... rsky_Telem)
Nécessite OpenTX 2.2 et une version récente d'arducoper, arduplane ou rover.
Testé sur un pixracer avec copter 3.5.3 et sur un clone pixhawk avec copter 3.5.4 et 3.5.5
// Captures d'écran
! [Taranis X9D +] (https://github.com/yaapu/FrskyTelemetry ... ES/x9d.png)
! [Taranis X9D +] (https://github.com/yaapu/FrskyTelemetry ... 9ddual.png)
! [Taranis X9D +] (https://github.com/yaapu/FrskyTelemetry ... ssages.png)
! [Taranis X7] (https://github.com/yaapu/FrskyTelemetry ... GES/x7.png)
! [Taranis X7] (https://github.com/yaapu/FrskyTelemetry ... x7dual.png)
! [Taranis X7] (https://github.com/yaapu/FrskyTelemetry ... ssages.png)
// Caractéristiques
- menu de configuration, appuyez longuement sur [MENU] pour afficher
- par configuration de modèle enregistrée dans MODELS / yaapu / modelname.cfg
- flight [modes] (# supported-flight-modes) basé sur le type de trame: copter, avion ou rover avec support de son vocal
- horizon artificiel avec roulis, tangage et lacet avec un en-tête de compas numérique
- mini icône de la maison sur la boussole de lacet à la position de l'angle de la maison
- tension de la batterie à partir de 3 sources (par ordre de priorité), appuyez brièvement sur [ENTER] cycles entre les sources
- Capteur de tension FLVSS frsky si disponible (vs est affiché à côté de la tension)
- Port analogique frsky si disponible (a2 est affiché à côté de la tension)
- contrôleur de vol par télémétrie (fc est affiché à côté de la tension)
- pile la plus basse si disponible ou cellule moyenne si non
- courant de la batterie
- Capacité de la batterie et la capacité de la batterie utilisée en mAh et%
- puissance comme tension de la batterie * courant
- Vitesse verticale sur le côté gauche de HUD
- altitude du côté droit de HUD
- gps altitude
- gps fixe extendend status (2D, 3D, DGPS, RTK)
- gps HDop
- temps de vol
- valeur rssi
- tension de l'émetteur
- distance à domicile
- vitesse au sol horizontale ou vitesse de l'air (disponible si configuré dans le planificateur de mission)
- home se dirigeant en triangle tournant
- Mavlink messages avec historique accessible avec +/- boutons appui court
- fichiers audio anglais, italien et français pour les événements sélectionnés: niveaux de batterie, sécurité intégrée, modes de vol, alertes et atterrissage
// Fonctionnalités avancées
- prise en charge de deux batteries (double FLVSS et / ou batterie double d'ArduPilot) appuyez brièvement sur [ENTER] pour afficher les deuxièmes informations sur la batterie. Si une seconde batterie est détectée, il y aura une étiquette "B1 + B2" sur l'écran.
- capacité ovveride pour les batteries 1 et 2
- suivi des valeurs min / max pour la tension batterie / cellule, courant, altitude, vitesse sol et verticale, appuyez brièvement sur [MENU] pour les afficher, une flèche pointant vers le haut indiquera les valeurs maximales tandis qu'une flèche pointant vers le bas indiquera les valeurs min
! [Menu X9D] (https://github.com/yaapu/FrskyTelemetry ... minmax.png)
! [Menu X7] (https://github.com/yaapu/FrskyTelemetry ... minmax.png)
- alertes vocales pour les niveaux de batterie,
- Clôture vocale: alertes de distance max et min / max d'altitude
- Alerte de minuterie vocale configurable toutes les n minutes
- les capteurs VFAS, CURR, Alt, VSpd, GAlt, Hdg, GSpd, Carburant, Tmp1, Tmp2 sont exposés à OpenTX, voir le [wiki] (https://github.com/yaapu/FrskyTelemetry ... Telemetry- Variables) pour plus de détails. Vous devez exécuter "découvrir de nouveaux capteurs" dans votre page de télémétrie modèle pour utiliser les capteurs dans OpenTX.
Les valeurs des capteurs ne sont transmises à OpenTX que lorsque le script reçoit une télémétrie valide du rx!
// Modes de vol pris en charge
/// Copter
// mode de vol soutien sonore
| 1 | Stabiliser | OUI |
| 2 | Acro | OUI |
| 3 | AltHold | OUI |
| 4 | Auto | OUI |
| 5 | GuidED | OUI |
| 6 | Loiter | OUI |
| 7 | RTL | OUI |
| 8 | Cercle | OUI |
| 10 | LAND | OUI |
| 12 | DRIFT | OUI |
| 14 | Sport | OUI |
| 15 | FLIP | OUI |
| 16 | AutoTune | OUI |
| 17 | PosHold | OUI |
| 18 | BRAKE | OUI |
| 19 | THROW | OUI |
| 20 | AvoidADSB | OUI |
| 21 | GuidedNOGPS | OUI |
| 22 | SmartRTL | OUI |
/// Avion et quadplane
// mode de vol soutien sonore
| 1 | Manuel | OUI |
| 2 | Cercle | OUI |
| 3 | Stabiliser | OUI |
| 4 | TRAINING | OUI |
| 5 | Acro | OUI |
| 6 | FlyByWireA | OUI |
| 7 | FlyByWireB | OUI |
| 8 | CrUISE | OUI |
| 9 | Autotune | OUI |
| 11 | Auto | OUI |
| 12 | RTL | OUI |
| 13 | Loiter | OUI |
| 15 | AvoidADSB | OUI |
| 16 | GuidED | OUI |
| 17 | Initialisation | OUI |
| 18 | QStabiliser | OUI |
| 19 | QHover | OUI |
| 20 | QLoiter | OUI |
| 21 | Qland | OUI |
| 22 | QRTL | OUI |
/// Rover
// mode soutien sonore
| 1 | Manuel | OUI |
| 2 | Acro | OUI |
| 4 | STEERING | OUI |
| 5 | HOLD | OUI |
| 11 | Auto | OUI |
| 12 | RTL | OUI |
| 13 | SmartRTL | OUI |
| 16 | GuidED | OUI |
| 17 | Initialisation | OUI |
// Sources de tension
La tension de batterie est suivie indépendamment pour 3 sources de batterie: FLVSS, port analogique A2 et contrôleur de vol. (Le script peut également utiliser la source de tension analogique A2 des récepteurs X4R et X6R, a2 serait affiché à côté de la tension de la cellule). Un appui court sur [ENTER] fait alterner toutes les sources. La valeur minimale est également suivie pour les 3 sources et peut être affichée avec une pression courte [MENU].
Si vous utilisez un second capteur de tension FLVSS, la variable OpenTX doit être renommée "cel2"
Lorsqu'une deuxième batterie est détectée, le script suit également les valeurs de batterie «agrégées» et affiche une étiquette «B1 + B2» dans le panneau de droite. La valeur de la cellule et la tension de la batterie est le "minimum" entre les deux batteries, le courant est additionné et le pourcentage de capacité est moyenné. Un appui court sur [MENU] affichera les valeurs min / max pour cette vue agrégée.
Un appui court sur [ENTER] permet de passer de la vue globale simple à la vue individuelle double batterie. Des pressions courtes successives sur [ENTER] dans cette double vue feront défiler les sources de tension. En double affichage, un appui court sur [MENU] affiche les valeurs min / max des packs individuels.
Pour revenir à la vue agrégée, appuyez brièvement sur [EXIT].
/ Détection du nombre de cellules
Le script utilise un moyen simple de calculer le nombre de cellules pour les sources de tension fc et a2:
- Si la tension maximale du pack est supérieure à 21.75v c'est-à-dire 4.35x5, alors c'est une 6s.
- Si la tension maximale du pack est supérieure à 17.4v c'est-à-dire 4.35x4 alors c'est un 5s.
- Si la tension maximale du pack est supérieure à 13.05v, c'est-à-dire 4.35x3, alors c'est un 4s.
- si la tension maximale du pack est supérieure à 8.7v c'est-à-dire 4.35x2, alors c'est un 3s.
- sinon c'est un 2s
Cela signifie à son tour que:
- Si vous connectez un 6s avec une tension de cellule inférieure à 3.625V, il sera détecté comme un 5s.
- Si vous connectez un 5s avec une tension de cellule inférieure à 3.48V, il sera détecté en tant que 4s.
- Si vous connectez un 4s avec une tension de cellule inférieure à 3.27V, il sera détecté comme un 3s.
Pour 3s et 2s, la limite est si basse que ce n'est pas un problème.
S'il vous plaît noter que la tension utilisée pour le calcul est la tension maximale de l'emballage, donc si après la détection, la tension de la cellule descend en dessous des limites ci-dessus, il sera ok.
// Alertes
Il y a 2 alertes de niveau de batterie, les deux sont définies comme tension de cellule donc indépendante du nombre de cellules.
Lorsque la tension minimale de la cellule atteint le premier niveau, elle déclenche une alerte vocale et le V situé à côté de la tension de la cellule commence à clignoter.
Le niveau de batterie 1 doit être plus élevé que le niveau de batterie 2.
Lorsque la tension de la cellule atteint le deuxième niveau de la batterie, elle déclenche une deuxième alerte vocale et la tension de la cellule commence à clignoter.
Si la batterie atteint le niveau de sécurité (elle doit être configurée dans le planificateur de mission), le script affichera «batt failsafe» sur le hud et jouera une alerte vocale toutes les n secondes (la période peut être configurée depuis le menu).
Il est également possible de configurer une minuterie qui déclenchera une alerte vocale toutes les n minutes de vol.
Le script prend également en charge une fonction de «clôture vocale» en définissant une altitude minimale, une altitude maximale et une alerte de distance maximale.
Lorsque le véhicule sort de la clôture, le script joue une alerte vocale toutes les n secondes.
// Configuration
! [Menu X9D] (https://github.com/yaapu/FrskyTelemetry ... nupag1.png)
! [Menu X9D] (https://github.com/yaapu/FrskyTelemetry ... nupag2.png)
! [Menu X7] (https://github.com/yaapu/FrskyTelemetry ... nupag1.png)
! [Menu X7] (https://github.com/yaapu/FrskyTelemetry ... nupag2.png)
La langue des alertes vocales est indépendante du langage radio et peut être configurée à partir du menu.
À l'heure actuelle, seuls l'anglais l'italien et le français sont pris en charge, mais de nouvelles langues peuvent être ajoutées facilement.
La capacité de la batterie pour la batterie 1 et la batterie 2 est automatiquement lue à partir des valeurs configurées dans le planificateur de mission, mais les deux peuvent être ignorées du menu. Quand une nouvelle capacité est définie à partir du menu, elle sera immédiatement utilisée dans tous les calculs et sa valeur sera affichée à l'écran.
// Installation
Copiez le contenu du dossier SD sur votre carte SD radio.
Assurez-vous d'avoir les dossiers SOUNDS / yaapu0 et MODELS / yaapu.
Pour les modèles X9D / X9D + et X9E, utilisez le script yaapu9.lua.
Pour la radio QX7, utilisez le script yaapu7.lua.
Le script est assez gros et la compilation sur votre radio peut échouer.
Le moyen le plus sûr est de le compiler sur Companion, puis de copier la version compilée .luac sur la carte SD dans le dossier / SCRIPTS / TELEMETRY.
Je fournis des versions déjà compilées pour X9D et QX7.
Note: Sur les radios sans l'option luac activée il est nécessaire de renommer le script de yaapu9.luac à yaapu9.lua et de yaapu7.luac à yaapu7.lua
Ps: si vous avez besoin de renommer yaapu9.luac ou yaapu7.luac en lua suivant la configuration de votre taranis n’oublier pas de renommer yaapu9.lua ou yaapu7.lua en (luab) afin d’éviter un conflit de fichier
Pour activer la lecture de fichiers audio, copiez-les dans les dossiers / SOUNDS / yaapu0 / fr et / SOUNDS / yaapu0 / it.
// Compilation
Pour compiler votre propre version, vous devez d'abord pré-traiter le script SOURCES / yaapu0.lua avec le préprocesseur pproc.lua.
Les détails sur le préprocesseur peuvent être trouvés [ici] (
Il y a plusieurs #define activent chacun une caractéristique spécifique du script.
Les plus importants sont X9 / X7 pour construire pour différents modèles de radio.
Vous avez besoin d'un interprète Lua pour que cela fonctionne.
Sur une ligne de commande, lancez simplement "lua pproc.lua yaapu0.lua yaapu9.lua"
Le script yaapu9.lua est maintenant prêt à être compilé dans Companion.
// Exigences matérielles
Veuillez vous référer au wiki arducopter pour plus d'informations sur la configuration de votre contrôleur de vol pour le protocole passthrough
- http://ardupilot.org/copter/docs/common ... rough.html
Pour plus d'informations sur la connexion de l'équipement FrSky, veuillez vous reporter à
- http://ardupilot.org/copter/docs/common ... -equipment
- http://ardupilot.org/copter/docs/common ... sky-cables
// Merci
Merci à Marco Robustini (testeur X9D), Chris Rey (testeur QX7) et Alain Chartier (alainlive) (fichiers son en Francais)
nouvelle télémétrie bien sympa et complète pour taranis x9d / x9d+/x9e et q x7 crée par Alex un italien du coté de Venise
qui fonctionne avec un ful-1 et Mini RS232 To TTL Converter
Nécessite OpenTX 2.2 et une version récente d'arducoper, arduplane ou rover.
Fonctionne avec arducopter ardurover arduplane et quadplane
Testé sur un pixracer avec copter 3.5.3 et sur un clone pixhawk avec copter 3.5.4 et 3.5.5

TARANIS X9D ET X9D+ X9E

TARANIS Q X7

lLien GITHUB https://github.com/yaapu/FrskyTelemetryScript
TELEMETRIE en Anglais Italien et français (sound)
passer le serial protocole s-port en (10) 10:FrSky SPort Passthrough (OpenTX)

Script de télémétrie Yaapu Frsky
Un script de télémétrie à base de lua pour la radio Taranis X9D +, X9E et X7 en utilisant le protocole frsky passthrough.
Le script supporte tous les paquets de télémétrie DIY 0x5000 envoyés par Ardupilot [frsky passthrough library library] (https://github.com/ArduPilot/ardupilot/ ... rsky_Telem)
Nécessite OpenTX 2.2 et une version récente d'arducoper, arduplane ou rover.
Testé sur un pixracer avec copter 3.5.3 et sur un clone pixhawk avec copter 3.5.4 et 3.5.5
// Captures d'écran
! [Taranis X9D +] (https://github.com/yaapu/FrskyTelemetry ... ES/x9d.png)
! [Taranis X9D +] (https://github.com/yaapu/FrskyTelemetry ... 9ddual.png)
! [Taranis X9D +] (https://github.com/yaapu/FrskyTelemetry ... ssages.png)
! [Taranis X7] (https://github.com/yaapu/FrskyTelemetry ... GES/x7.png)
! [Taranis X7] (https://github.com/yaapu/FrskyTelemetry ... x7dual.png)
! [Taranis X7] (https://github.com/yaapu/FrskyTelemetry ... ssages.png)
// Caractéristiques
- menu de configuration, appuyez longuement sur [MENU] pour afficher
- par configuration de modèle enregistrée dans MODELS / yaapu / modelname.cfg
- flight [modes] (# supported-flight-modes) basé sur le type de trame: copter, avion ou rover avec support de son vocal
- horizon artificiel avec roulis, tangage et lacet avec un en-tête de compas numérique
- mini icône de la maison sur la boussole de lacet à la position de l'angle de la maison
- tension de la batterie à partir de 3 sources (par ordre de priorité), appuyez brièvement sur [ENTER] cycles entre les sources
- Capteur de tension FLVSS frsky si disponible (vs est affiché à côté de la tension)
- Port analogique frsky si disponible (a2 est affiché à côté de la tension)
- contrôleur de vol par télémétrie (fc est affiché à côté de la tension)
- pile la plus basse si disponible ou cellule moyenne si non
- courant de la batterie
- Capacité de la batterie et la capacité de la batterie utilisée en mAh et%
- puissance comme tension de la batterie * courant
- Vitesse verticale sur le côté gauche de HUD
- altitude du côté droit de HUD
- gps altitude
- gps fixe extendend status (2D, 3D, DGPS, RTK)
- gps HDop
- temps de vol
- valeur rssi
- tension de l'émetteur
- distance à domicile
- vitesse au sol horizontale ou vitesse de l'air (disponible si configuré dans le planificateur de mission)
- home se dirigeant en triangle tournant
- Mavlink messages avec historique accessible avec +/- boutons appui court
- fichiers audio anglais, italien et français pour les événements sélectionnés: niveaux de batterie, sécurité intégrée, modes de vol, alertes et atterrissage
// Fonctionnalités avancées
- prise en charge de deux batteries (double FLVSS et / ou batterie double d'ArduPilot) appuyez brièvement sur [ENTER] pour afficher les deuxièmes informations sur la batterie. Si une seconde batterie est détectée, il y aura une étiquette "B1 + B2" sur l'écran.
- capacité ovveride pour les batteries 1 et 2
- suivi des valeurs min / max pour la tension batterie / cellule, courant, altitude, vitesse sol et verticale, appuyez brièvement sur [MENU] pour les afficher, une flèche pointant vers le haut indiquera les valeurs maximales tandis qu'une flèche pointant vers le bas indiquera les valeurs min
! [Menu X9D] (https://github.com/yaapu/FrskyTelemetry ... minmax.png)
! [Menu X7] (https://github.com/yaapu/FrskyTelemetry ... minmax.png)
- alertes vocales pour les niveaux de batterie,
- Clôture vocale: alertes de distance max et min / max d'altitude
- Alerte de minuterie vocale configurable toutes les n minutes
- les capteurs VFAS, CURR, Alt, VSpd, GAlt, Hdg, GSpd, Carburant, Tmp1, Tmp2 sont exposés à OpenTX, voir le [wiki] (https://github.com/yaapu/FrskyTelemetry ... Telemetry- Variables) pour plus de détails. Vous devez exécuter "découvrir de nouveaux capteurs" dans votre page de télémétrie modèle pour utiliser les capteurs dans OpenTX.
Les valeurs des capteurs ne sont transmises à OpenTX que lorsque le script reçoit une télémétrie valide du rx!
// Modes de vol pris en charge
/// Copter
// mode de vol soutien sonore
| 1 | Stabiliser | OUI |
| 2 | Acro | OUI |
| 3 | AltHold | OUI |
| 4 | Auto | OUI |
| 5 | GuidED | OUI |
| 6 | Loiter | OUI |
| 7 | RTL | OUI |
| 8 | Cercle | OUI |
| 10 | LAND | OUI |
| 12 | DRIFT | OUI |
| 14 | Sport | OUI |
| 15 | FLIP | OUI |
| 16 | AutoTune | OUI |
| 17 | PosHold | OUI |
| 18 | BRAKE | OUI |
| 19 | THROW | OUI |
| 20 | AvoidADSB | OUI |
| 21 | GuidedNOGPS | OUI |
| 22 | SmartRTL | OUI |
/// Avion et quadplane
// mode de vol soutien sonore
| 1 | Manuel | OUI |
| 2 | Cercle | OUI |
| 3 | Stabiliser | OUI |
| 4 | TRAINING | OUI |
| 5 | Acro | OUI |
| 6 | FlyByWireA | OUI |
| 7 | FlyByWireB | OUI |
| 8 | CrUISE | OUI |
| 9 | Autotune | OUI |
| 11 | Auto | OUI |
| 12 | RTL | OUI |
| 13 | Loiter | OUI |
| 15 | AvoidADSB | OUI |
| 16 | GuidED | OUI |
| 17 | Initialisation | OUI |
| 18 | QStabiliser | OUI |
| 19 | QHover | OUI |
| 20 | QLoiter | OUI |
| 21 | Qland | OUI |
| 22 | QRTL | OUI |
/// Rover
// mode soutien sonore
| 1 | Manuel | OUI |
| 2 | Acro | OUI |
| 4 | STEERING | OUI |
| 5 | HOLD | OUI |
| 11 | Auto | OUI |
| 12 | RTL | OUI |
| 13 | SmartRTL | OUI |
| 16 | GuidED | OUI |
| 17 | Initialisation | OUI |
// Sources de tension
La tension de batterie est suivie indépendamment pour 3 sources de batterie: FLVSS, port analogique A2 et contrôleur de vol. (Le script peut également utiliser la source de tension analogique A2 des récepteurs X4R et X6R, a2 serait affiché à côté de la tension de la cellule). Un appui court sur [ENTER] fait alterner toutes les sources. La valeur minimale est également suivie pour les 3 sources et peut être affichée avec une pression courte [MENU].
Si vous utilisez un second capteur de tension FLVSS, la variable OpenTX doit être renommée "cel2"
Lorsqu'une deuxième batterie est détectée, le script suit également les valeurs de batterie «agrégées» et affiche une étiquette «B1 + B2» dans le panneau de droite. La valeur de la cellule et la tension de la batterie est le "minimum" entre les deux batteries, le courant est additionné et le pourcentage de capacité est moyenné. Un appui court sur [MENU] affichera les valeurs min / max pour cette vue agrégée.
Un appui court sur [ENTER] permet de passer de la vue globale simple à la vue individuelle double batterie. Des pressions courtes successives sur [ENTER] dans cette double vue feront défiler les sources de tension. En double affichage, un appui court sur [MENU] affiche les valeurs min / max des packs individuels.
Pour revenir à la vue agrégée, appuyez brièvement sur [EXIT].
/ Détection du nombre de cellules
Le script utilise un moyen simple de calculer le nombre de cellules pour les sources de tension fc et a2:
- Si la tension maximale du pack est supérieure à 21.75v c'est-à-dire 4.35x5, alors c'est une 6s.
- Si la tension maximale du pack est supérieure à 17.4v c'est-à-dire 4.35x4 alors c'est un 5s.
- Si la tension maximale du pack est supérieure à 13.05v, c'est-à-dire 4.35x3, alors c'est un 4s.
- si la tension maximale du pack est supérieure à 8.7v c'est-à-dire 4.35x2, alors c'est un 3s.
- sinon c'est un 2s
Cela signifie à son tour que:
- Si vous connectez un 6s avec une tension de cellule inférieure à 3.625V, il sera détecté comme un 5s.
- Si vous connectez un 5s avec une tension de cellule inférieure à 3.48V, il sera détecté en tant que 4s.
- Si vous connectez un 4s avec une tension de cellule inférieure à 3.27V, il sera détecté comme un 3s.
Pour 3s et 2s, la limite est si basse que ce n'est pas un problème.
S'il vous plaît noter que la tension utilisée pour le calcul est la tension maximale de l'emballage, donc si après la détection, la tension de la cellule descend en dessous des limites ci-dessus, il sera ok.
// Alertes
Il y a 2 alertes de niveau de batterie, les deux sont définies comme tension de cellule donc indépendante du nombre de cellules.
Lorsque la tension minimale de la cellule atteint le premier niveau, elle déclenche une alerte vocale et le V situé à côté de la tension de la cellule commence à clignoter.
Le niveau de batterie 1 doit être plus élevé que le niveau de batterie 2.
Lorsque la tension de la cellule atteint le deuxième niveau de la batterie, elle déclenche une deuxième alerte vocale et la tension de la cellule commence à clignoter.
Si la batterie atteint le niveau de sécurité (elle doit être configurée dans le planificateur de mission), le script affichera «batt failsafe» sur le hud et jouera une alerte vocale toutes les n secondes (la période peut être configurée depuis le menu).
Il est également possible de configurer une minuterie qui déclenchera une alerte vocale toutes les n minutes de vol.
Le script prend également en charge une fonction de «clôture vocale» en définissant une altitude minimale, une altitude maximale et une alerte de distance maximale.
Lorsque le véhicule sort de la clôture, le script joue une alerte vocale toutes les n secondes.
// Configuration
! [Menu X9D] (https://github.com/yaapu/FrskyTelemetry ... nupag1.png)
! [Menu X9D] (https://github.com/yaapu/FrskyTelemetry ... nupag2.png)
! [Menu X7] (https://github.com/yaapu/FrskyTelemetry ... nupag1.png)
! [Menu X7] (https://github.com/yaapu/FrskyTelemetry ... nupag2.png)
La langue des alertes vocales est indépendante du langage radio et peut être configurée à partir du menu.
À l'heure actuelle, seuls l'anglais l'italien et le français sont pris en charge, mais de nouvelles langues peuvent être ajoutées facilement.
La capacité de la batterie pour la batterie 1 et la batterie 2 est automatiquement lue à partir des valeurs configurées dans le planificateur de mission, mais les deux peuvent être ignorées du menu. Quand une nouvelle capacité est définie à partir du menu, elle sera immédiatement utilisée dans tous les calculs et sa valeur sera affichée à l'écran.
// Installation
Copiez le contenu du dossier SD sur votre carte SD radio.
Assurez-vous d'avoir les dossiers SOUNDS / yaapu0 et MODELS / yaapu.
Pour les modèles X9D / X9D + et X9E, utilisez le script yaapu9.lua.
Pour la radio QX7, utilisez le script yaapu7.lua.
Le script est assez gros et la compilation sur votre radio peut échouer.
Le moyen le plus sûr est de le compiler sur Companion, puis de copier la version compilée .luac sur la carte SD dans le dossier / SCRIPTS / TELEMETRY.
Je fournis des versions déjà compilées pour X9D et QX7.
Note: Sur les radios sans l'option luac activée il est nécessaire de renommer le script de yaapu9.luac à yaapu9.lua et de yaapu7.luac à yaapu7.lua
Ps: si vous avez besoin de renommer yaapu9.luac ou yaapu7.luac en lua suivant la configuration de votre taranis n’oublier pas de renommer yaapu9.lua ou yaapu7.lua en (luab) afin d’éviter un conflit de fichier
Pour activer la lecture de fichiers audio, copiez-les dans les dossiers / SOUNDS / yaapu0 / fr et / SOUNDS / yaapu0 / it.
// Compilation
Pour compiler votre propre version, vous devez d'abord pré-traiter le script SOURCES / yaapu0.lua avec le préprocesseur pproc.lua.
Les détails sur le préprocesseur peuvent être trouvés [ici] (
Il y a plusieurs #define activent chacun une caractéristique spécifique du script.
Les plus importants sont X9 / X7 pour construire pour différents modèles de radio.
Vous avez besoin d'un interprète Lua pour que cela fonctionne.
Sur une ligne de commande, lancez simplement "lua pproc.lua yaapu0.lua yaapu9.lua"
Le script yaapu9.lua est maintenant prêt à être compilé dans Companion.
// Exigences matérielles
Veuillez vous référer au wiki arducopter pour plus d'informations sur la configuration de votre contrôleur de vol pour le protocole passthrough
- http://ardupilot.org/copter/docs/common ... rough.html
Pour plus d'informations sur la connexion de l'équipement FrSky, veuillez vous reporter à
- http://ardupilot.org/copter/docs/common ... -equipment
- http://ardupilot.org/copter/docs/common ... sky-cables
// Merci
Merci à Marco Robustini (testeur X9D), Chris Rey (testeur QX7) et Alain Chartier (alainlive) (fichiers son en Francais)


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}