Mon quadri DIY
Posté : jeu. 26 avr. 2018 21:34
Bonjour,
Je vous présente mon quadri fait maison.
C'est un châssis en H en alu inspiré de ce que j'ai trouvé sur internet.
les diagonales font 500mm
sa masse en ordre de marche est de 1300gr
Motorisation:
moteurs chinois SUNNYSKY X2212 980KV 180W Brushless (aliexpress)
ESC chinois 30A SimonK lighting hobby (aliexpress)
Hélices 10x4.5 en plastique chinois (aliexpress)
batterie Lippo 3S 5500mAh (hobbyking)
Contrôleur de vol:
J'ai d'abord fabriqué un contrôleur sur un circuit d'essai à base d'arduino et de capteurs indépendant reliés en i2c, le tout avec Multiwii.
Ca a volé, mais il y avait beaucoup d'erreurs sur le bus I2C, ce qui perturbait le software .
Le drone n'était pas stable et très difficile à garder en vol
L'essai d'un capteur barométrique c'est soldé par une montée d'enfer et un plantage en règle à la cime d'un arbre
Aujourd'hui il est équipé d'une carte Flip32 et du firmware cleanflight 1.14.
Radio:
Modification d'une radio futab 41Mhz en 2.4Ghz. Je n'ai gardé que la boite la batterie et les joysticks.
encodeur PPM à base d'aruino nano
module émetteur Frsky DHT 8CH
recepteur FrSky V8R7-II 2.4G 8CH
module bluetooth avec appli android

J'ai essayé de mettre un gps avec le firmware Inav mais la flip32 n'a pas assez de puissance

vol d'essai dans le jardin: helices KC
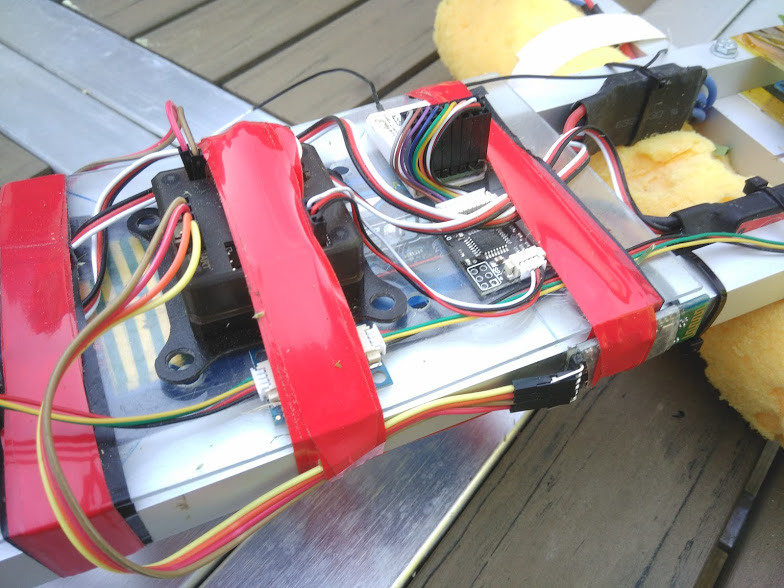
c'est une plateforme d'essai, le scotch c'est pas beau mais pratique


En vol:
Je suis débutant, et je n'ai qu'un bout de jardin pour faire mes essais.
voila le comportement constaté.
Utilisation en mode Angle:
Le quadri décolle mais retombe des qu'on lâche les gaz, je suis obligé passer en mode baro pour le stabiliser en hauteur.
il est bien a plat mais glisse en permanence sur ses axes
La moindre sollicitation des manches et le voila parti comme une fusée .
.
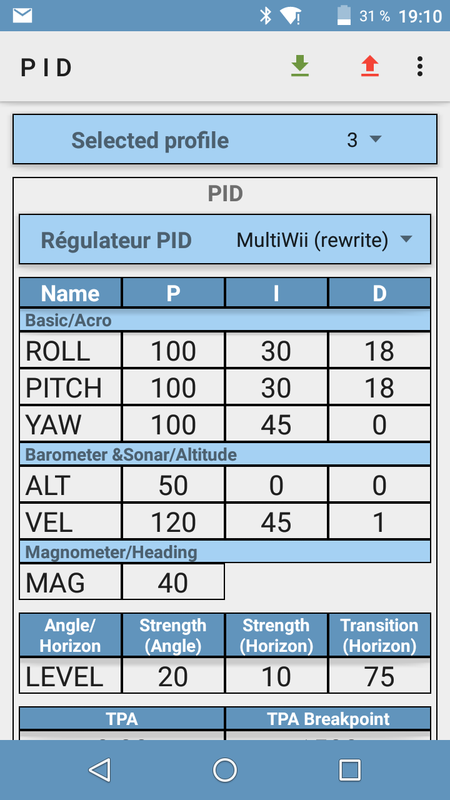
voici les PID:
Questions:
ce comportement est-il normal ?
Je voulais un drone au vol pépère qui se dirige a un doigt, pas un cheval qui ne demande qu'a partir au galo
faut-il changer les réglages ou le contrôleur de vol ?
Merci de vos éclairages !
Je vous présente mon quadri fait maison.
C'est un châssis en H en alu inspiré de ce que j'ai trouvé sur internet.
les diagonales font 500mm
sa masse en ordre de marche est de 1300gr
Motorisation:
moteurs chinois SUNNYSKY X2212 980KV 180W Brushless (aliexpress)
ESC chinois 30A SimonK lighting hobby (aliexpress)
Hélices 10x4.5 en plastique chinois (aliexpress)
batterie Lippo 3S 5500mAh (hobbyking)
Contrôleur de vol:
J'ai d'abord fabriqué un contrôleur sur un circuit d'essai à base d'arduino et de capteurs indépendant reliés en i2c, le tout avec Multiwii.
Ca a volé, mais il y avait beaucoup d'erreurs sur le bus I2C, ce qui perturbait le software .
Le drone n'était pas stable et très difficile à garder en vol
L'essai d'un capteur barométrique c'est soldé par une montée d'enfer et un plantage en règle à la cime d'un arbre
Aujourd'hui il est équipé d'une carte Flip32 et du firmware cleanflight 1.14.
Radio:
Modification d'une radio futab 41Mhz en 2.4Ghz. Je n'ai gardé que la boite la batterie et les joysticks.
encodeur PPM à base d'aruino nano
module émetteur Frsky DHT 8CH
recepteur FrSky V8R7-II 2.4G 8CH
module bluetooth avec appli android
J'ai essayé de mettre un gps avec le firmware Inav mais la flip32 n'a pas assez de puissance
vol d'essai dans le jardin: helices KC
c'est une plateforme d'essai, le scotch c'est pas beau mais pratique
En vol:
Je suis débutant, et je n'ai qu'un bout de jardin pour faire mes essais.
voila le comportement constaté.
Utilisation en mode Angle:
Le quadri décolle mais retombe des qu'on lâche les gaz, je suis obligé passer en mode baro pour le stabiliser en hauteur.
il est bien a plat mais glisse en permanence sur ses axes
La moindre sollicitation des manches et le voila parti comme une fusée
voici les PID:
Questions:
ce comportement est-il normal ?
Je voulais un drone au vol pépère qui se dirige a un doigt, pas un cheval qui ne demande qu'a partir au galo
faut-il changer les réglages ou le contrôleur de vol ?
Merci de vos éclairages !
