Je t'invite à essayer de pousser le D pour voir ce que ça fait sur les vibrations.
Je suis pas d'accord avec la définition du D d'Oscar, pour moi c'est du I ce qu'il décrit. Le D au contraire va ralentir à mesure qu'on s'approche pour éviter de dépasser l'objectif.
Le I ne mémorise rien il maintient le P plus longtemps pour atteindre la cible le plus rapidement possible. Pour la fréquence des oscillations il est possible que celles du I soient plus lentes que celles du P mais rien à voir avec celles du D.
maudits PID, aucun tuto ne m'a aidé
-
furynick

- Administrateur du site
- Messages : 2754
- Enregistré le : mer. 5 févr. 2014 13:46
- Réputation : 5
- Localisation : Portet-sur-Garonne
- Contact :
Re: maudits PID, aucun tuto ne m'a aidé
Tx:Taranis+ & T6J
Yon²:Talon v2, E600, 14x4.7, X2&M8N, APM3.2, T-2D, H3+S, X8R
Rēsu:ZMR 250, RCX10, 5x3, Naze32, X4R
Akuro:F450, Afro slim, 9x5 tri, X2&M8N, APM3.2, X4R
-
giova

- Tricopter
- Messages : 105
- Enregistré le : mer. 9 mars 2016 23:41
- Réputation : 0
Re: maudits PID, aucun tuto ne m'a aidé
Comme il n'arrette pas de pleuvoir  je continue à me documenter et en fait j'ai l'impression que le problème que j'ai eu lors de mes tentatives de réglage était d'avoir un D trop faible.
je continue à me documenter et en fait j'ai l'impression que le problème que j'ai eu lors de mes tentatives de réglage était d'avoir un D trop faible.
J'ai tellement lu "il faut que D soit le plus petit que possible" que je me focalisais sur P pour régler le problème des vibrations et oscilations, je finissais par tourner en rond en me disant "j'y comprend rien".
@fury : tu as ecrit :
à 5 les oscilations disparaissent
à 10 des vibrations apparaissent
J'imagine qu'entre les 2 je n'aurai ni vibration ni oscilation (en supposant que P était bien réglé et I reste à 0), j'ai bien compris?
Tu ecris ensuite
EDIT :
au fait, une video que j'ai trouvé pas mal, où le mec explique les symptomes du P I D :
J'ai tellement lu "il faut que D soit le plus petit que possible" que je me focalisais sur P pour régler le problème des vibrations et oscilations, je finissais par tourner en rond en me disant "j'y comprend rien".
@fury : tu as ecrit :
Donc imaginons:augmenter D jusqu'à disparition des oscillations
- augmenter encore D jusqu'à l'apparition de vibrations rapides
à 5 les oscilations disparaissent
à 10 des vibrations apparaissent
J'imagine qu'entre les 2 je n'aurai ni vibration ni oscilation (en supposant que P était bien réglé et I reste à 0), j'ai bien compris?
Tu ecris ensuite
largement? donc j'ai donné en exemple 5 et 10, je coupe la poire en deux et baisse jusqu'à 7?- baisser D largement sous le seuil d'apparition des vibrations
EDIT :
au fait, une video que j'ai trouvé pas mal, où le mec explique les symptomes du P I D :
-
Guillaume22

- Pilote toutes catégories
- Messages : 1988
- Enregistré le : mar. 14 mai 2013 08:24
- Réputation : 5
Re: maudits PID, aucun tuto ne m'a aidé
Pour moi on règle le P jusque cela tremble puis on monte le D ce qui permet de remonter encore le P un peu
Envoyé de mon iPad en utilisant Tapatalk
Envoyé de mon iPad en utilisant Tapatalk
Hexa quadrame naza v2
QAV400 naza lite
Pocket Naze 32
Twinstar APM 2.5
Doghfighter multiplex
Hélico Hurrican 550 CP
.....
QAV400 naza lite
Pocket Naze 32
Twinstar APM 2.5
Doghfighter multiplex
Hélico Hurrican 550 CP
.....
-
Wovokaa

- Pilote toutes catégories
- Messages : 2692
- Enregistré le : ven. 6 mars 2015 01:16
- Réputation : 5
- Localisation : Pays-Basque
Re: maudits PID, aucun tuto ne m'a aidé
Bonjour,
mon expérience du jour.
Aujourd'hui j'ai changé le servo de mon Tri en APM 2.8, maintenant la commande est absolument sans aucun jeu, et avec une force de plus de 10kg, ça assure, tout en me rassurant
Cependant le réglage en vol n'est pas parfait, le Yaw oscille très très légèrement autour de son neutre en stationnaire, vraiment très peu, mais peut mieux faire.
Alors je descends le P par paliers de 10 points, ça ne change rien, le I est calé à 0.020 (un truc comme ça), je ne peux que le descendre, sans pouvoir le remonter, le I passé à 0.015 ne change rien, c'est à ce moment là que je touche au D, il est à 0 d'origine, je le remonte très très peu, on va dire 0.004, et là ça change tout, mon Yaw ne bouge plus d'un poil [yahoo.gif]
Comme quoi il suffit parfois de peu de chose
mon expérience du jour.
Aujourd'hui j'ai changé le servo de mon Tri en APM 2.8, maintenant la commande est absolument sans aucun jeu, et avec une force de plus de 10kg, ça assure, tout en me rassurant
Cependant le réglage en vol n'est pas parfait, le Yaw oscille très très légèrement autour de son neutre en stationnaire, vraiment très peu, mais peut mieux faire.
Alors je descends le P par paliers de 10 points, ça ne change rien, le I est calé à 0.020 (un truc comme ça), je ne peux que le descendre, sans pouvoir le remonter, le I passé à 0.015 ne change rien, c'est à ce moment là que je touche au D, il est à 0 d'origine, je le remonte très très peu, on va dire 0.004, et là ça change tout, mon Yaw ne bouge plus d'un poil [yahoo.gif]
Comme quoi il suffit parfois de peu de chose
*** André ***
"Je suis ce que je suis, grâce à ce que nous sommes tous"
Une autre passion, le Field Target,
http://www.afft.fr/forum/index.php?sid= ... 5789de1703
Ma chaîne YT,
https://www.youtube.com/user/wovoka64/videos
"Je suis ce que je suis, grâce à ce que nous sommes tous"
Une autre passion, le Field Target,
http://www.afft.fr/forum/index.php?sid= ... 5789de1703
Ma chaîne YT,
https://www.youtube.com/user/wovoka64/videos
-
giova
- Tricopter
- Messages : 105
- Enregistré le : mer. 9 mars 2016 23:41
- Réputation : 0
Re: maudits PID, aucun tuto ne m'a aidé
Journal de bord du nul 
J'ai pu entre 2 averses faire un début de séance. Tout à 0 pour commencer, sauf les P à 3 histoire d'avoir un minimum de controle.
Un beau challenge car avec les I à 0 il faut en permanence apporter de la correction.
Je commence par le roll, monte son P de 0.1 en 0.1 et fini par entendre un son different au niveau des moteurs.
Et là je me demande : dois je continuer à monter le P jusqu'à voir clairement que ca vibre? ou est ce que ce début de vibrato à peine audible est suffisant pour estimer que ça vibre???
Je décide de passer au D (le P étant à 4.4) car la bete est vraiment dure à dompter dans ces conditions, un vrai rodéo !
Je monte D de 1 en 1... avec D=3 le son disparait, je monte encore D, mais le drone part tellement de tout les coté à cause du I=0 que je serai bien incapable de déceller la moindre oscilation.
Je décide donc de passer au pitch histoire d'améliorer les conditions de vol, avec lui j'ai du monter P à 8.5 pour commencer à entendre les moteurs faire un léger vibrato.
Et là aussi le son a disparu quand D est monté à 3. J'ai donc continué de monter D jusqu'à 12 là ou le drone commence à osciller, mais je ne suis pas bien sur, oscille t'il assez?
Le drone tente tellement de partir dans tous les sens! Ce que je prend pour une oscilation n'est peut etre qu'une "illusion".
Je réduit donc D à 9.
Puis il se remet à pleuvoir, la suite demain...
Résultat actuel
Roll:
P=4.4
I=0
D=3
Pitch
P=8.5
I=0
D=9
Yaw
P=3
I=0
D=0
J'ai pu entre 2 averses faire un début de séance. Tout à 0 pour commencer, sauf les P à 3 histoire d'avoir un minimum de controle.
Un beau challenge car avec les I à 0 il faut en permanence apporter de la correction.
Je commence par le roll, monte son P de 0.1 en 0.1 et fini par entendre un son different au niveau des moteurs.
Et là je me demande : dois je continuer à monter le P jusqu'à voir clairement que ca vibre? ou est ce que ce début de vibrato à peine audible est suffisant pour estimer que ça vibre???
Je décide de passer au D (le P étant à 4.4) car la bete est vraiment dure à dompter dans ces conditions, un vrai rodéo !
Je monte D de 1 en 1... avec D=3 le son disparait, je monte encore D, mais le drone part tellement de tout les coté à cause du I=0 que je serai bien incapable de déceller la moindre oscilation.
Je décide donc de passer au pitch histoire d'améliorer les conditions de vol, avec lui j'ai du monter P à 8.5 pour commencer à entendre les moteurs faire un léger vibrato.
Et là aussi le son a disparu quand D est monté à 3. J'ai donc continué de monter D jusqu'à 12 là ou le drone commence à osciller, mais je ne suis pas bien sur, oscille t'il assez?
Le drone tente tellement de partir dans tous les sens! Ce que je prend pour une oscilation n'est peut etre qu'une "illusion".
Je réduit donc D à 9.
Puis il se remet à pleuvoir, la suite demain...
Résultat actuel
Roll:
P=4.4
I=0
D=3
Pitch
P=8.5
I=0
D=9
Yaw
P=3
I=0
D=0
-
furynick
- Administrateur du site
- Messages : 2754
- Enregistré le : mer. 5 févr. 2014 13:46
- Réputation : 5
- Localisation : Portet-sur-Garonne
- Contact :
Re: maudits PID, aucun tuto ne m'a aidé
Pour moi la démarche est bonne, par contre je ne comprends pas comment la machine peut partir dans tous les sens.
Il faut régler P et D pour que la machine réagisse aux manches le plus rapidement possible sans aucune vibration/oscillation
Ensuite régler I pour "verrouiller" la machine en position.
Il faut régler P et D pour que la machine réagisse aux manches le plus rapidement possible sans aucune vibration/oscillation
Ensuite régler I pour "verrouiller" la machine en position.
Tx:Taranis+ & T6J
Yon²:Talon v2, E600, 14x4.7, X2&M8N, APM3.2, T-2D, H3+S, X8R
Rēsu:ZMR 250, RCX10, 5x3, Naze32, X4R
Akuro:F450, Afro slim, 9x5 tri, X2&M8N, APM3.2, X4R
-
giova
- Tricopter
- Messages : 105
- Enregistré le : mer. 9 mars 2016 23:41
- Réputation : 0
Re: maudits PID, aucun tuto ne m'a aidé
"Partir dans tous les sens" : il dérive en permanence, et sur tous les axes, comme si je pilotais complétement bourré.
Grace à la blackbox je pense que j'arrive à m'en sortir, je chasse les formes sinuosidales (que je ne peux pas totalement éradiquer visiblement).
Si le P forme une sinuosidale de forte amplitude, le gyro fini par suivre cette sinuosidale, c'est là ou je baisse le P.
Par contre j'en suis à l'étape où je monte le P du yaw, j'ai beau le monter encore et encore, pour l'instant aucune fibration, et P du yaw reste plat sur les graphs.
Voici un petit screenshot avec mes réglages actuels losrque je fais du stationnaire :
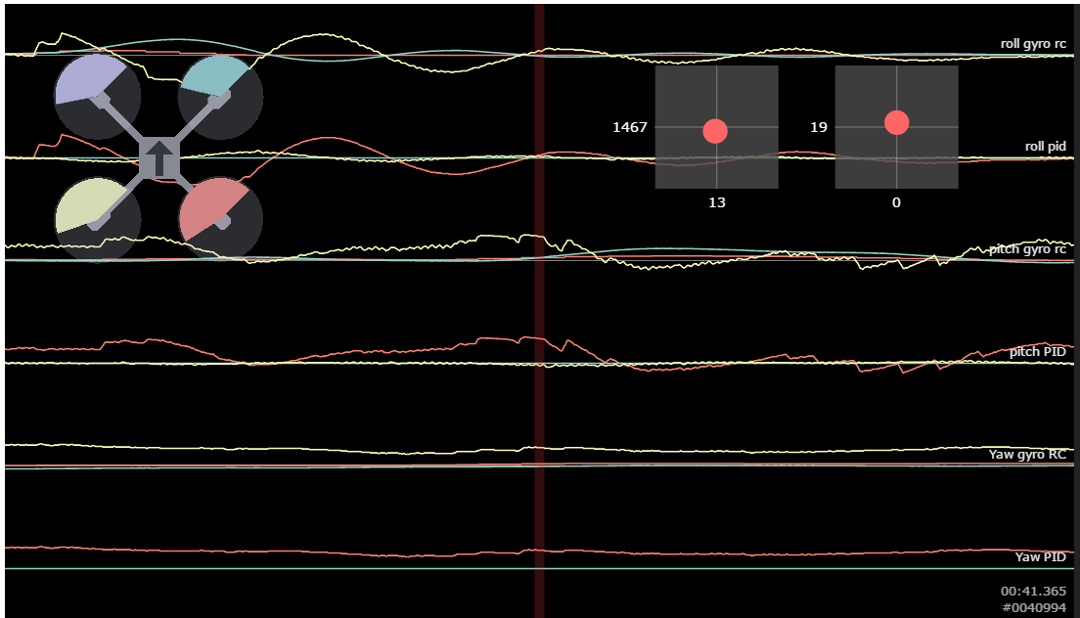
Voila comment il réagit lorsqu'un phénomène indeterminé se produit
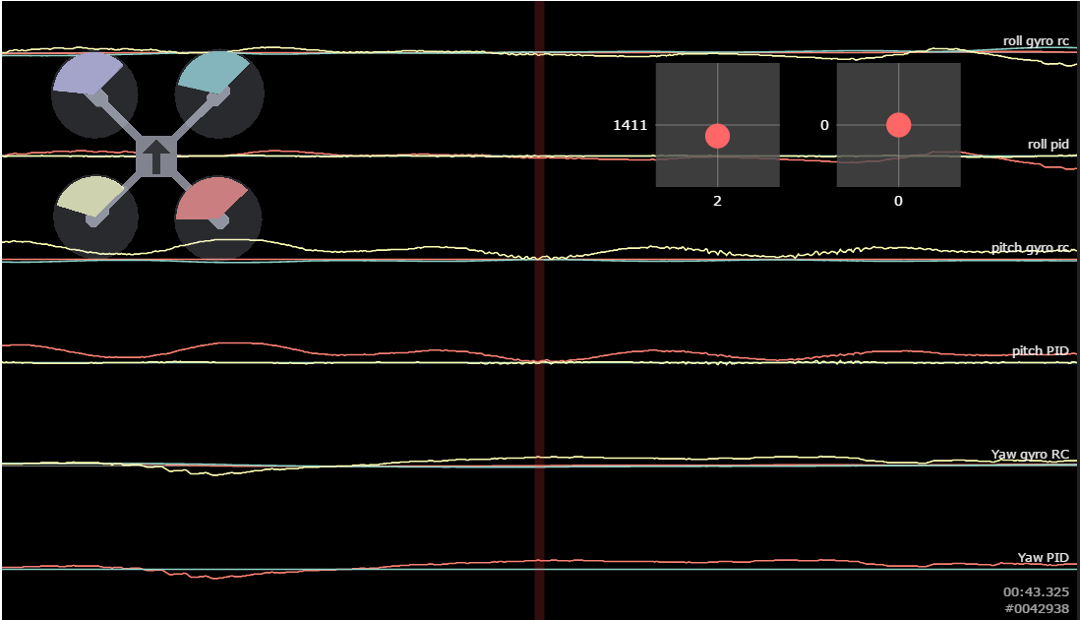
Lorsque tout est calme on note que certains P forment quand même une sinuosidale, mais le plus important c'est le signal du gyro (en turquoise) qui reste bien plat.
J'ai aussi un problème récurent, c'est peut etre normal : lorsqu'il y effet de sol (donc il vol à 5cm du sol), il oscille à la limite c'est une vibration.
Grace à la blackbox je pense que j'arrive à m'en sortir, je chasse les formes sinuosidales (que je ne peux pas totalement éradiquer visiblement).
Si le P forme une sinuosidale de forte amplitude, le gyro fini par suivre cette sinuosidale, c'est là ou je baisse le P.
Par contre j'en suis à l'étape où je monte le P du yaw, j'ai beau le monter encore et encore, pour l'instant aucune fibration, et P du yaw reste plat sur les graphs.
Voici un petit screenshot avec mes réglages actuels losrque je fais du stationnaire :
Voila comment il réagit lorsqu'un phénomène indeterminé se produit
Lorsque tout est calme on note que certains P forment quand même une sinuosidale, mais le plus important c'est le signal du gyro (en turquoise) qui reste bien plat.
J'ai aussi un problème récurent, c'est peut etre normal : lorsqu'il y effet de sol (donc il vol à 5cm du sol), il oscille à la limite c'est une vibration.
-
giova
- Tricopter
- Messages : 105
- Enregistré le : mer. 9 mars 2016 23:41
- Réputation : 0
Re: maudits PID, aucun tuto ne m'a aidé
J'ai fais une petite vidéo qui montre la progression de mes réglages.
Et je rencontre toujours et encore les même problèmes :
-Des secousses qui des fois se produisent lors de chutte (mais pas toujours) voir à 00:40
-Au choix, soit le drone dérive (I trop bas) soit il devient instable
Egalement: je n'arrive pas à régler le lacet, j'ai monté son P jusqu'à 13 sans ressentir le moindre changement concernant les secousses.
Enfin avec la blackbox cette fois : les graphs sont plats, en stationnaire on dirait que tout va bien, et pourtant sur la vidéo on voit bien que ca secoue !!!
Sur la vidéo :
du début à 00:40 : je suis en mode stabilisé, je ne touche à aucune commande
Tout le reste est en mode accro
de 01:25 à 01:40 : je joue avec le roll
de 01:40 à 01:50 : je joue avec le pitch
à 02:00 je fais un roll flip
à 02:10 je fais un back flip
de 02:15 à 02:40 je joue avec le yaw
à 02:45 je fais un looping
Ensuite je me contente de naviguer gentillement.
On ne me voit pas taper de ligne droite, quand je le fait, le quad pique du nez et roule vers la gauche.
Mes réglages :
Roll
P: 4.3
I: 0,017
D: 9
Pitch
P: 7
I: 0.022
D: 33
Yaw
P: 12
I: 0.020
D: 5
Et je rencontre toujours et encore les même problèmes :
-Des secousses qui des fois se produisent lors de chutte (mais pas toujours) voir à 00:40
-Au choix, soit le drone dérive (I trop bas) soit il devient instable
Egalement: je n'arrive pas à régler le lacet, j'ai monté son P jusqu'à 13 sans ressentir le moindre changement concernant les secousses.
Enfin avec la blackbox cette fois : les graphs sont plats, en stationnaire on dirait que tout va bien, et pourtant sur la vidéo on voit bien que ca secoue !!!
Sur la vidéo :
du début à 00:40 : je suis en mode stabilisé, je ne touche à aucune commande
Tout le reste est en mode accro
de 01:25 à 01:40 : je joue avec le roll
de 01:40 à 01:50 : je joue avec le pitch
à 02:00 je fais un roll flip
à 02:10 je fais un back flip
de 02:15 à 02:40 je joue avec le yaw
à 02:45 je fais un looping
Ensuite je me contente de naviguer gentillement.
On ne me voit pas taper de ligne droite, quand je le fait, le quad pique du nez et roule vers la gauche.
Mes réglages :
Roll
P: 4.3
I: 0,017
D: 9
Pitch
P: 7
I: 0.022
D: 33
Yaw
P: 12
I: 0.020
D: 5
-
Geoffroy08

- Hexacopter
- Messages : 490
- Enregistré le : sam. 16 mai 2015 22:27
- Réputation : 2
Re: maudits PID, aucun tuto ne m'a aidé
Tout simplement passionnant. merci.
J’intégrerais quelque question a moi quand j'aurais un peu de temps.
J’intégrerais quelque question a moi quand j'aurais un peu de temps.
-
olivier0253

- Tricopter
- Messages : 126
- Enregistré le : mer. 2 mars 2016 18:40
- Réputation : 0
Re: maudits PID, aucun tuto ne m'a aidé
Pour tes secousses à 00:40, ça ne serait pas corrigé en augmentant la valeur de D pour le roll?...
-
furynick
- Administrateur du site
- Messages : 2754
- Enregistré le : mer. 5 févr. 2014 13:46
- Réputation : 5
- Localisation : Portet-sur-Garonne
- Contact :
Re: maudits PID, aucun tuto ne m'a aidé
pour contrer les oscillations (sinusoïdes) il faut monter le D.
Pour moi t'es pas trop mal sur les réglages, pousse le D jusqu'à voir apparaitre des vibrations et diminue jusqu'à ce qu'elles disparaissent.
Après ça tu peux encore monter P normalement ainsi que D quand les oscillations réapparaissent.
Au pire tu dois avoir un rebond, pas plus.
Ensuite tu montes I pour que la courbe de réaction colle au plus près la courbe de consigne.
Pour moi t'es pas trop mal sur les réglages, pousse le D jusqu'à voir apparaitre des vibrations et diminue jusqu'à ce qu'elles disparaissent.
Après ça tu peux encore monter P normalement ainsi que D quand les oscillations réapparaissent.
Au pire tu dois avoir un rebond, pas plus.
Ensuite tu montes I pour que la courbe de réaction colle au plus près la courbe de consigne.
Tx:Taranis+ & T6J
Yon²:Talon v2, E600, 14x4.7, X2&M8N, APM3.2, T-2D, H3+S, X8R
Rēsu:ZMR 250, RCX10, 5x3, Naze32, X4R
Akuro:F450, Afro slim, 9x5 tri, X2&M8N, APM3.2, X4R
-
giova
- Tricopter
- Messages : 105
- Enregistré le : mer. 9 mars 2016 23:41
- Réputation : 0
Re: maudits PID, aucun tuto ne m'a aidé
J'ai pu refaire une sceance ce matin à la fraiche (et très humide  ).
).
Premier vol sans toucher à rien pour reprendre mes marque, et de nouveau ces oscilations lors de la chutte.
@ olivier0253 : j'ai donc monté le D du roll comme tu l'as suggéré, j'y suis allé franchement pour clairement ressentir une différence. Avant D vallait 15, désormais 26.
Et les vibrations lors des chuttes semblent etre parties !
J'ai aussi monté fortement le I sur le pitch, car quand je mettais beaucoup de gaz, le quad piquait du nez, je suis passé de I= 0.005 à 0.015 et ca va mieux, ça bouge encore un peu, mais si je met plus le drone oscille quand je fais des mouvements brusques.
Pareille sur le Yaw le quad tournait sur lui meme des que je poussais les gaz, j'ai du monter le I jusqu'à 0.07 ce qui est énorme je trouve. Du coup quand je donne un coup de yaw et relache, le quad revient un peu vers sa position initiale.Exemple, je donne un violent coup de yaw vers la gauche , quand il a tourné à 45° je relache, le drone revire alors de 15° vers la droite.
Je pense que je commence à etre pas mal, le quad est un peu mou mais je n'ai plus de vibration ou mauvaise surprise, je vais tester un peu plus puis je m'attaquerai aux rates de chaque axe pour etre vif et omogène.
Premier vol sans toucher à rien pour reprendre mes marque, et de nouveau ces oscilations lors de la chutte.
@ olivier0253 : j'ai donc monté le D du roll comme tu l'as suggéré, j'y suis allé franchement pour clairement ressentir une différence. Avant D vallait 15, désormais 26.
Et les vibrations lors des chuttes semblent etre parties !
J'ai aussi monté fortement le I sur le pitch, car quand je mettais beaucoup de gaz, le quad piquait du nez, je suis passé de I= 0.005 à 0.015 et ca va mieux, ça bouge encore un peu, mais si je met plus le drone oscille quand je fais des mouvements brusques.
Pareille sur le Yaw le quad tournait sur lui meme des que je poussais les gaz, j'ai du monter le I jusqu'à 0.07 ce qui est énorme je trouve. Du coup quand je donne un coup de yaw et relache, le quad revient un peu vers sa position initiale.Exemple, je donne un violent coup de yaw vers la gauche , quand il a tourné à 45° je relache, le drone revire alors de 15° vers la droite.
Je pense que je commence à etre pas mal, le quad est un peu mou mais je n'ai plus de vibration ou mauvaise surprise, je vais tester un peu plus puis je m'attaquerai aux rates de chaque axe pour etre vif et omogène.
-
furynick
- Administrateur du site
- Messages : 2754
- Enregistré le : mer. 5 févr. 2014 13:46
- Réputation : 5
- Localisation : Portet-sur-Garonne
- Contact :
Re: maudits PID, aucun tuto ne m'a aidé
Qu'est-ce que tu appelle les chutes ?
Tx:Taranis+ & T6J
Yon²:Talon v2, E600, 14x4.7, X2&M8N, APM3.2, T-2D, H3+S, X8R
Rēsu:ZMR 250, RCX10, 5x3, Naze32, X4R
Akuro:F450, Afro slim, 9x5 tri, X2&M8N, APM3.2, X4R
-
giova
- Tricopter
- Messages : 105
- Enregistré le : mer. 9 mars 2016 23:41
- Réputation : 0
Re: maudits PID, aucun tuto ne m'a aidé
Regarde ma vidéo à 40 secondes, c'est flagrantfurynick a écrit :Qu'est-ce que tu appelle les chutes ?
Et encore là je baissais à peine les gaz, si je les baisse plus et remet du jus pour rallentir la chutte, c'est pire! à la limite du décrochage.
On dirait que plus de D a résolu le problème, mais avec toute cette pluie, mes scéances sont écourtées à chaque fois.
-
opossome64

- Pilote toutes catégories
- Messages : 907
- Enregistré le : jeu. 17 oct. 2013 18:22
- Réputation : 0
- Localisation : Plus au sud ...
Re: maudits PID, aucun tuto ne m'a aidé
Yop !
Sur ton log Blackbox , on voit surtout un déséquilibre de poussés entre les moteurs , l’arrière droit par exemple pousse toujours plus que les autres .
Donc avant de te prendre la tête avec les PID , équilibrage du multi + vérification des moteurs (point dur , vis trop longues ... ) .
++
Sur ton log Blackbox , on voit surtout un déséquilibre de poussés entre les moteurs , l’arrière droit par exemple pousse toujours plus que les autres .
Donc avant de te prendre la tête avec les PID , équilibrage du multi + vérification des moteurs (point dur , vis trop longues ... ) .
++
- SpeedRacer 210 - RS2205 - XM20A - SP3 Betaflight
- QX90
- Optic6 2.4Ghz FRSky
- BaseSD + VRX + faceplate mod
Chaine Youtube
- QX90
- Optic6 2.4Ghz FRSky
- BaseSD + VRX + faceplate mod
Chaine Youtube
-
merlinx63

- Octocopter
- Messages : 600
- Enregistré le : ven. 8 avr. 2016 08:19
- Réputation : 0
Re: maudits PID, aucun tuto ne m'a aidé
De mon coté je n'ai même pas la blackbox donc je galère encore plus.
Aujourd'hui, pour essayer, j'ai installé le firmware betaflight 2.9.0 sur mon Naze32 rev5 acro. Firmware à charger manuellement. Avec Le PID controller Luxfloat.
Dediou !! rien à voir. Rien qu'avec les paramètres par défaut mon multi Y6 a complètement changé de comportement. Faut dire que j'avais du mettre des PID vraiment foireux, mais tout de même je ne l'ai jamais vu aussi bien voler. Doux, précis mais ça envoie aussi quand on tape un peu dans les manches !
Faut que je confirme ça sur quelques vols, mais je revis.
Si ça peut aider ...
Aujourd'hui, pour essayer, j'ai installé le firmware betaflight 2.9.0 sur mon Naze32 rev5 acro. Firmware à charger manuellement. Avec Le PID controller Luxfloat.
Dediou !! rien à voir. Rien qu'avec les paramètres par défaut mon multi Y6 a complètement changé de comportement. Faut dire que j'avais du mettre des PID vraiment foireux, mais tout de même je ne l'ai jamais vu aussi bien voler. Doux, précis mais ça envoie aussi quand on tape un peu dans les manches !
Faut que je confirme ça sur quelques vols, mais je revis.
Si ça peut aider ...
Xugong V2-Pixhawk-E300 920kv ESC15A-10x5-Gopro-nacelle 3axes-4S5200mAh-1.650kg(16mn)
ZMR250-NAZE32-MT2205 2300kv-blheli 20A-dalprop5045-fpv
QX95 - pour casser les bibelots et décapiter les orchidées de madame - mais quel KIF !
ZMR250-NAZE32-MT2205 2300kv-blheli 20A-dalprop5045-fpv
QX95 - pour casser les bibelots et décapiter les orchidées de madame - mais quel KIF !
-
giova
- Tricopter
- Messages : 105
- Enregistré le : mer. 9 mars 2016 23:41
- Réputation : 0
Re: maudits PID, aucun tuto ne m'a aidé
Oui j'avais vu, ce déséquilibre vous parrait vraiment trop grand?opossome64 a écrit :Yop !
Sur ton log Blackbox , on voit surtout un déséquilibre de poussés entre les moteurs , l’arrière droit par exemple pousse toujours plus que les autres .
Donc avant de te prendre la tête avec les PID , équilibrage du multi + vérification des moteurs (point dur , vis trop longues ... ) .
++
il est du au vtx que j'ai du excentrer, je n'ai pour l'heure aucune solution à part du lest pour corriger ça
-
furynick
- Administrateur du site
- Messages : 2754
- Enregistré le : mer. 5 févr. 2014 13:46
- Réputation : 5
- Localisation : Portet-sur-Garonne
- Contact :
Re: maudits PID, aucun tuto ne m'a aidé
Pour mémoire, le tuto ardu pour régler les PID manuellement :
http://diydrones.com/forum/topics/arduc ... ning-guide" onclick="window.open(this.href);return false;
http://diydrones.com/forum/topics/arduc ... ning-guide" onclick="window.open(this.href);return false;
Tx:Taranis+ & T6J
Yon²:Talon v2, E600, 14x4.7, X2&M8N, APM3.2, T-2D, H3+S, X8R
Rēsu:ZMR 250, RCX10, 5x3, Naze32, X4R
Akuro:F450, Afro slim, 9x5 tri, X2&M8N, APM3.2, X4R
-
merlinx63
- Octocopter
- Messages : 600
- Enregistré le : ven. 8 avr. 2016 08:19
- Réputation : 0
Re: maudits PID, aucun tuto ne m'a aidé
Fausse joie et mauvaise surprise.merlinx63 a écrit :De mon coté je n'ai même pas la blackbox donc je galère encore plus.
Aujourd'hui, pour essayer, j'ai installé le firmware betaflight 2.9.0 sur mon Naze32 rev5 acro. Firmware à charger manuellement. Avec Le PID controller Luxfloat.
Dediou !! rien à voir. Rien qu'avec les paramètres par défaut mon multi Y6 a complètement changé de comportement. Faut dire que j'avais du mettre des PID vraiment foireux, mais tout de même je ne l'ai jamais vu aussi bien voler. Doux, précis mais ça envoie aussi quand on tape un peu dans les manches !
Faut que je confirme ça sur quelques vols, mais je revis.
J'y ai cru mais non. j'ai refais des vols un peu plus sportifs et j'ai des oscillations aussi. J'ai même mis le zing au tas sur une descente, il s'est mis en oscillation au freinage (20m au dessus du sol) et impossible de le stabiliser avant de toucher la planete. 20m de descente en oscillation, gaz ou pas gaz, rien n'y a fait. 1h de recherche dans le champs de blé (du coup je commande un buzzer !!) et 1 hélice de cassée.
Xugong V2-Pixhawk-E300 920kv ESC15A-10x5-Gopro-nacelle 3axes-4S5200mAh-1.650kg(16mn)
ZMR250-NAZE32-MT2205 2300kv-blheli 20A-dalprop5045-fpv
QX95 - pour casser les bibelots et décapiter les orchidées de madame - mais quel KIF !
ZMR250-NAZE32-MT2205 2300kv-blheli 20A-dalprop5045-fpv
QX95 - pour casser les bibelots et décapiter les orchidées de madame - mais quel KIF !
-
giova
- Tricopter
- Messages : 105
- Enregistré le : mer. 9 mars 2016 23:41
- Réputation : 0
Re: maudits PID, aucun tuto ne m'a aidé
Comme je le disais j'ai partiellement résolu ce problème en mettant plus de D sur le pitch et roll. Mais dans les PID tout rentre en compte, c'est ce qui rend la tache extremement arduemerlinx63 a écrit :20m de descente en oscillation, gaz ou pas gaz, rien n'y a fait.
J'ai anticipé ce problème en installant un OSD autonome qui dispose d'un GPS. Comme toi il s'est vautré en plein champ de blé. J'ai repassé la vidéo en arrière pour noter les coordonnées GPS de la derniere image enregistrée. Et avec mon téléphone j'ai tapé les coordonnées GPS, je l'ai retrouvé en 5 minutes1h de recherche dans le champs de blé
Mon osd : DALRC QOSD
-
jmboudet

- Pilote toutes catégories
- Messages : 1472
- Enregistré le : mar. 27 oct. 2015 20:02
- Réputation : 5
- Localisation : Chatelaillon plage
- Genre :
Re: maudits PID, aucun tuto ne m'a aidé
@merlinx63
Regarde cela si ça peut t'intéresser http://www.multi-rotor-fans-club.com/vi ... 57&t=18775" onclick="window.open(this.href);return false;
Regarde cela si ça peut t'intéresser http://www.multi-rotor-fans-club.com/vi ... 57&t=18775" onclick="window.open(this.href);return false;
-
merlinx63
- Octocopter
- Messages : 600
- Enregistré le : ven. 8 avr. 2016 08:19
- Réputation : 0
Re: maudits PID, aucun tuto ne m'a aidé
Merci les gars pour les conseils pour retrouver mon drone. Mais le but n'est pas de tomber normalement !
Et puis ce drone est fait s'amuser, donc pas de GPS ni de bousole, ni de fpv, ni osd, ni baro, ni ....
Juste le nécessaire : hélice, moteur et lipo (et bientôt un buzzer à 1€ pour ne pas ruiner les champs de blé ... juste au cas où ...).
Par contre, et pour revenir au sujet, je suis bon pour replancher sur les PID !
Et puis ce drone est fait s'amuser, donc pas de GPS ni de bousole, ni de fpv, ni osd, ni baro, ni ....
Juste le nécessaire : hélice, moteur et lipo (et bientôt un buzzer à 1€ pour ne pas ruiner les champs de blé ... juste au cas où ...).
Par contre, et pour revenir au sujet, je suis bon pour replancher sur les PID !
Xugong V2-Pixhawk-E300 920kv ESC15A-10x5-Gopro-nacelle 3axes-4S5200mAh-1.650kg(16mn)
ZMR250-NAZE32-MT2205 2300kv-blheli 20A-dalprop5045-fpv
QX95 - pour casser les bibelots et décapiter les orchidées de madame - mais quel KIF !
ZMR250-NAZE32-MT2205 2300kv-blheli 20A-dalprop5045-fpv
QX95 - pour casser les bibelots et décapiter les orchidées de madame - mais quel KIF !
-
giova
- Tricopter
- Messages : 105
- Enregistré le : mer. 9 mars 2016 23:41
- Réputation : 0
Re: maudits PID, aucun tuto ne m'a aidé
Et encore une défaite pour canard
J'ai encore en vain passé 4 heures à me battre, je commence sérieusement à décourager là
Déjà, je ne sais toujours pas ce que c'est une drone qui oscille
Quelqu'un pourrait t'il nous montrer un extrait vidéo qui montre clairement un exemple flagrant d'oscillation?
Je pense que sans cette info je n'y arriverai jamais !
SVP un exemple d'oscillation !!!!
La seule solution serait de lester pour équilibrer (je ne peux vraiment rien déplacer).
Arg, je désespere sincérement
J'ai encore en vain passé 4 heures à me battre, je commence sérieusement à décourager là
Déjà, je ne sais toujours pas ce que c'est une drone qui oscille
Quelqu'un pourrait t'il nous montrer un extrait vidéo qui montre clairement un exemple flagrant d'oscillation?
Je pense que sans cette info je n'y arriverai jamais !
SVP un exemple d'oscillation !!!!
opossome64 a écrit :Yop !
Sur ton log Blackbox , on voit surtout un déséquilibre de poussés entre les moteurs , l’arrière droit par exemple pousse toujours plus que les autres .
++
Alors, vraiment trop grand ou pas svp?giova a écrit :
Oui j'avais vu, ce déséquilibre vous parrait vraiment trop grand?
La seule solution serait de lester pour équilibrer (je ne peux vraiment rien déplacer).
Arg, je désespere sincérement