Bonjour,
si vous le voulez bien, retour sur l'Auto Tune.
Mais avant d'en parler, pourquoi mon choix s'est-il porté sur le petit Cheerson CX20, tout simplement pour nourrir mon projet d'un Y6 équipé d'un APM, et comme le cœur de vol du CX20 est un APM 2.5.2, j'apprends avec lui

Je veux donc essayer l'Auto Tune, mais le gros problème est que l'AT ne se met en route qu'avec le canal 7 ou 8, or la radio du CX20 n'a que 6 voies, les 4 voies principales + 2 auxiliaires pour commander un Pan Tilt sur la nacelle Cam

Par contre en cherchant un peu, j'ai trouvé où se trouve le canal 8 sur le FC APM, c'est ainsi que j'ai ouvert le CX20,

voilà où se trouve la boussole,

bien dégagée des ondes électromagnétiques

et maintenant le fameux canal 8, juste une pin's à cet endroit,

Le but maintenant est de commander cette voie 8, sinon effectuer l'Auto Tune sera tout simplement impossible, c'est alors que j'ai trouvé une astuce, elle est très simple et même logique, il faut simplement dériver la voie d'une commande auxiliaire vers cette voie 8, encore facile, nous avons nos deux sorties auxiliaires plantées sous le multi.
J'ai alors pris un cordon mâle/mâle de 100 mm (un peu court), j'ai enlevé les deux prises, pour ne garder que le fil du signal (blanc), du coté extérieur la prise retrouve ce fil, le fil est ensuite glissé par l'ouverture où se trouvent les sorties accessoires, puis branché sur le FC en voie 8.
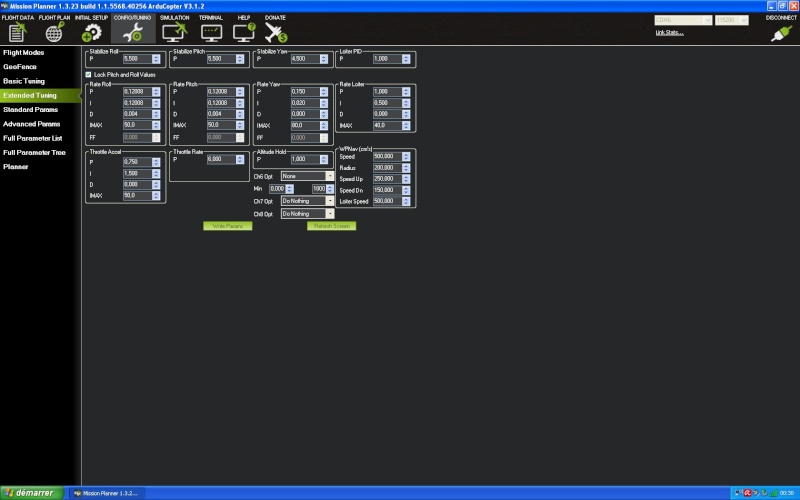
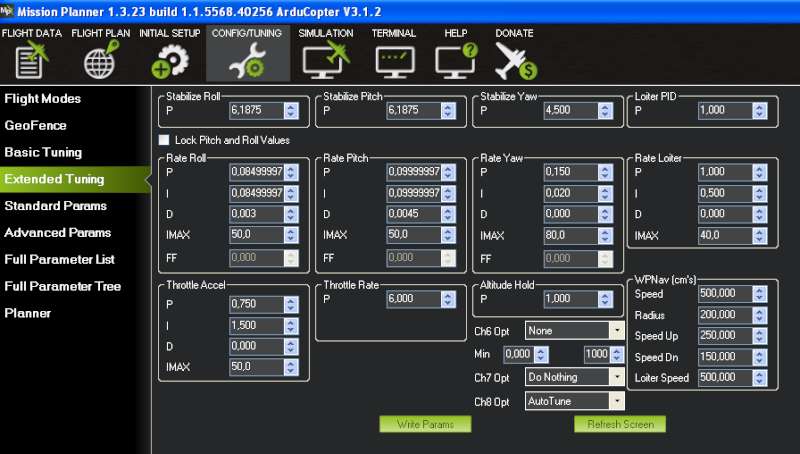
Maintenant voyons si tout fonctionne, ouverture de Mission Planner, sauvegarde des PID d'origine, on ne sait jamais, il faut pouvoir les retrouver, alors copie d'écran de cette sauvegarde,

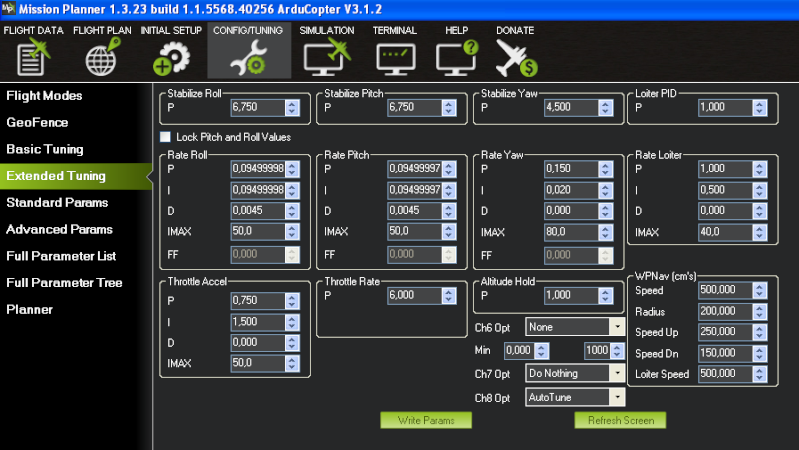
le canal 8 est attribué à l'Auto Tune,


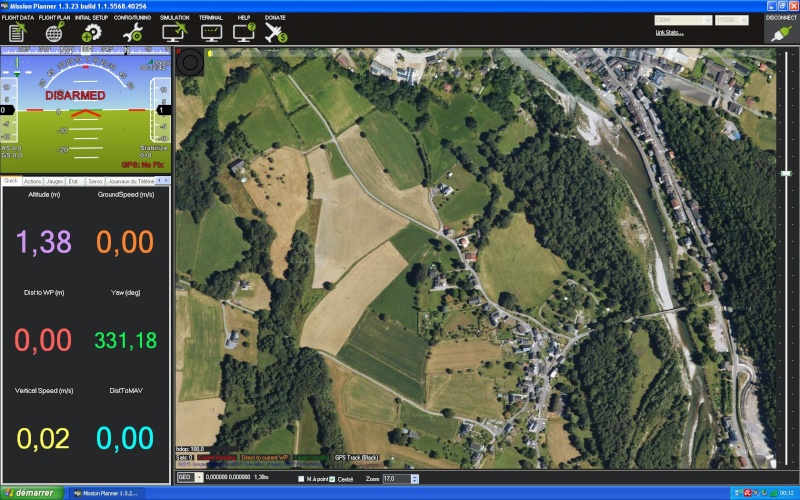
la commande 8 fonctionne parfaitement avec la voie Aux2 de la radio,

Tout parait maintenant en ordre pour régler les PID avec l'Auto Tune, remontage du CX20, que des vis BTR sur des inserts en laiton, tout cela respire la qualité
Le fil de la prise destinée à la voie 8 est un peu court, alors pour les besoins de cette fonction, une rallonge servo a été installée, elle ne servira que pour l'AT, et sera ensuite déposée du CX20, la voie auxiliaire retrouvant sa fonction première,

Aujourd'hui il y a un peu de vent, mais maintenant que tout est monté, il ne faut pas reculer pour un aussi petit détail

c'est ainsi que je me dirige vers le champ juste à coté de la maison.
Décollage du multi en manuel, position Alt Hold (Baro), le bouton Aux2 est tourné à fond vers la droite, c'est alors que la danse commence par des coups vifs sur le latéral, puis en longitudinal, et si parfois le multi s'éloigne un peu trop, les commandes de la radio sont toujours disponibles, l'Auto Tune reprend sa danse quand on lâche les manches, le manège dure un bon petit moment, puis il s'arrête, il faut alors tester les réglages et voir s'ils sont corrects en Manuel, en GPS, en Alt Hold, si c'est le cas, on pose le multi en mode manuel, puis désarmement des moteurs.
Attention, c'est le désarmement qui valide les nouveaux réglages, alors s'ils ne vous conviennent pas, il faut mettre la commande 8 sur Off avant de désarmer, on retrouve ainsi les réglages d'avant cet essai Auto Tune, voilà les nouveaux PID sur Mission Planner, ils ont bien changé,

Dire que c'est mieux qu'avant l'AT, c'est difficile de se prononcer pour le moment, le CX20 volait déjà très très bien avant
Ce petit tuto rapide, qui à la base n'en est pas vraiment un, est évidemment valable pour toutes machines équipées d'un APM, pas seulement pour le CX20/Quanum Nova, il peut aussi permettre l'Auto Tune, si la radio n'est pas vraiment prévue pour assurer cette fonction, il faut simplement dériver une voie libre vers le canal 8, facile non ?!
Conclusion de l'histoire du jour, c'est facile l'Auto Tune, il faut juste réfléchir un peu, et ça fonctionne nickel
* Edit du 23 avril 2015 : le CX20 volait très bien avec ses réglages d'origine, après l'Auto Tune il vole encore mieux, disons qu'il y a, juste a priori, peu de différences de comportement, mais filmant tous mes vols en caméra embarquée (sans gimbal) pour justement les analyser avec un peu de recul, la stabilité après les réglages AT est bien visible, elle est incontestablement meilleure.
Un simple exemple, aujourd'hui le petit multi peut se permettre de décoller tout doucement, de se poser tout aussi doucement, le FC analyse et donne les ordres opportuns avec une certaine brillance, l'effet de sol ne semble plus trop exister, même si naturellement il existe toujours...