CX-20 Open-source
-
jmboudet

- Pilote toutes catégories
- Messages : 1472
- Enregistré le : mar. 27 oct. 2015 20:02
- Réputation : 5
- Localisation : Chatelaillon plage
- Genre :
Re: CX-20 Open-source
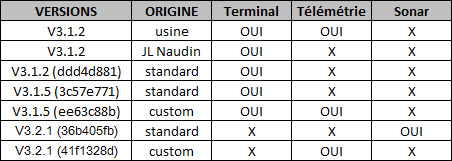
oui mais pour cela il faut être en firmware 3.2.1 et ensuite tu choisis ce mode de vol sur Mp dans flight mode
-
nikond3

- Quadricopter
- Messages : 299
- Enregistré le : ven. 27 nov. 2015 11:45
- Réputation : 0
- Localisation : 78550 Houdan
Re: CX-20 Open-source
Bonjour JM,
En 3.2.1 "normal" ou "custom"/.?
@+
En 3.2.1 "normal" ou "custom"/.?
@+

La vitesse de la lumière est supérieure à celle du son. C'est pourquoi, bien des gens ont l'air brillants jusqu'à ce qu'ils ouvrent la
bouche
-Phantom 1 V1.1.1 / Feiyu mini 2D / Xiaomi yi / Full FPV
-Phantom 3 Standard
-Phantom 3 Advanced
-
jmboudet
- Pilote toutes catégories
- Messages : 1472
- Enregistré le : mar. 27 oct. 2015 20:02
- Réputation : 5
- Localisation : Chatelaillon plage
- Genre :
Re: CX-20 Open-source
Sur un Apm 2.8 il faut être en firmware normal. La version custom est pour le 2.5 d'origine du CX.
-
nikond3
- Quadricopter
- Messages : 299
- Enregistré le : ven. 27 nov. 2015 11:45
- Réputation : 0
- Localisation : 78550 Houdan
Re: CX-20 Open-source
je suis en 3.2.1 (36b405fb)...ça te dis quelques chose...?
La vitesse de la lumière est supérieure à celle du son. C'est pourquoi, bien des gens ont l'air brillants jusqu'à ce qu'ils ouvrent la
bouche
-Phantom 1 V1.1.1 / Feiyu mini 2D / Xiaomi yi / Full FPV
-Phantom 3 Standard
-Phantom 3 Advanced
-
nikond3
- Quadricopter
- Messages : 299
- Enregistré le : ven. 27 nov. 2015 11:45
- Réputation : 0
- Localisation : 78550 Houdan
Re: CX-20 Open-source
il est préférable de mettre Poshold et de remplacer quel mode du coup...je ne suis pas un expert du vol en manuel de toutes façons...
Du style SWB...quoi.?
..........SWA...quoi?
@+
Du style SWB...quoi.?
..........SWA...quoi?
@+
La vitesse de la lumière est supérieure à celle du son. C'est pourquoi, bien des gens ont l'air brillants jusqu'à ce qu'ils ouvrent la
bouche
-Phantom 1 V1.1.1 / Feiyu mini 2D / Xiaomi yi / Full FPV
-Phantom 3 Standard
-Phantom 3 Advanced
-
Chris42

- Pilote toutes catégories
- Messages : 1061
- Enregistré le : mer. 2 sept. 2015 23:13
- Réputation : 0
Re: CX-20 Open-source
Oui, c'est le standard, celui qu'il faut pour l'APM 2.8
Tu peux sans inconvénient remplacer le Loiter par le Poshold
Tu peux sans inconvénient remplacer le Loiter par le Poshold
Cheerson CX20 (APM 2.8, Télémétrie, Xiaomi Yi, Walkera G2-D, FPV)
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
-
jmboudet
- Pilote toutes catégories
- Messages : 1472
- Enregistré le : mar. 27 oct. 2015 20:02
- Réputation : 5
- Localisation : Chatelaillon plage
- Genre :
Re: CX-20 Open-source
pour la version 3.2.1 normale il n'y en a qu'une. perso mes modes de vols sont stabilize, althold (pour voler sans gps), poshold, land, rtl. Exactement ce que j'allais te dire si Chris42 n'avait pas été aussi rapide 
-
JeeAiif

- Octocopter
- Messages : 581
- Enregistré le : lun. 28 déc. 2015 16:25
- Réputation : 0
- Localisation : lyon
-
nikond3
- Quadricopter
- Messages : 299
- Enregistré le : ven. 27 nov. 2015 11:45
- Réputation : 0
- Localisation : 78550 Houdan
Re: CX-20 Open-source
Merci Chris42...et si j'ai bien compris, on peut décollé et atterrir sans rien toucher durant tout le vol...? et le bouzin devient du coup plus souple dans ses manœuvres et moins de risques pour une chute "comme une ME..."?
La vitesse de la lumière est supérieure à celle du son. C'est pourquoi, bien des gens ont l'air brillants jusqu'à ce qu'ils ouvrent la
bouche
-Phantom 1 V1.1.1 / Feiyu mini 2D / Xiaomi yi / Full FPV
-Phantom 3 Standard
-Phantom 3 Advanced
-
nikond3
- Quadricopter
- Messages : 299
- Enregistré le : ven. 27 nov. 2015 11:45
- Réputation : 0
- Localisation : 78550 Houdan
Re: CX-20 Open-source
C'est quoi la différence entre Land et RTL...?
La vitesse de la lumière est supérieure à celle du son. C'est pourquoi, bien des gens ont l'air brillants jusqu'à ce qu'ils ouvrent la
bouche
-Phantom 1 V1.1.1 / Feiyu mini 2D / Xiaomi yi / Full FPV
-Phantom 3 Standard
-Phantom 3 Advanced
-
JeeAiif
- Octocopter
- Messages : 581
- Enregistré le : lun. 28 déc. 2015 16:25
- Réputation : 0
- Localisation : lyon
Re: CX-20 Open-source
Land ,il atteri a la vertical de la ou tu as enclenché ce mode
RTL, il revient a la vertical de la ou tu as armé les moteurs et atterri tout seul.
RTL, il revient a la vertical de la ou tu as armé les moteurs et atterri tout seul.
-
jmboudet
- Pilote toutes catégories
- Messages : 1472
- Enregistré le : mar. 27 oct. 2015 20:02
- Réputation : 5
- Localisation : Chatelaillon plage
- Genre :
Re: CX-20 Open-source
Le Land c'est juste pour atterrir quand on veut et où l'on veut. Les directions sont actives pour le guider pendant sa descente. Le drone se pose et coupe les moteurs. Pendant cette phase on peut mettre les gaz à zéro. Le RTL c'est pour revenir au point d'armement des moteurs. Je fais en sorte que lors du rtl, le drone reste à 3m du sol à attendre les ordres en réglant RTL_ALT_FINAL à 300
-
nikond3
- Quadricopter
- Messages : 299
- Enregistré le : ven. 27 nov. 2015 11:45
- Réputation : 0
- Localisation : 78550 Houdan
Re: CX-20 Open-source
Land...tu le vois de loin et t’aperçois qu'il dérive tu clic sur Land et il ce pose là ou il est...,?
RTL...tu enclenche et il revient à toi...?
je continu à en apprendre tous les jours...merci Mrs.
RTL...tu enclenche et il revient à toi...?
je continu à en apprendre tous les jours...merci Mrs.
La vitesse de la lumière est supérieure à celle du son. C'est pourquoi, bien des gens ont l'air brillants jusqu'à ce qu'ils ouvrent la
bouche
-Phantom 1 V1.1.1 / Feiyu mini 2D / Xiaomi yi / Full FPV
-Phantom 3 Standard
-Phantom 3 Advanced
-
Chris42
- Pilote toutes catégories
- Messages : 1061
- Enregistré le : mer. 2 sept. 2015 23:13
- Réputation : 0
Re: CX-20 Open-source
La voilà, ma vidéo que je trouve sympa :Chris42 a écrit :Mais j'ai une belle vidéo sous presse actuellement, à suivre ...
Cheerson CX20 (APM 2.8, Télémétrie, Xiaomi Yi, Walkera G2-D, FPV)
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
-
nikond3
- Quadricopter
- Messages : 299
- Enregistré le : ven. 27 nov. 2015 11:45
- Réputation : 0
- Localisation : 78550 Houdan
Re: CX-20 Open-source
A...ça j'aime bien cette manip...tu le pose que quand tu le décide...!!!cool.jmboudet a écrit :Le Land c'est juste pour atterrir quand on veut et où l'on veut. Les directions sont actives pour le guider pendant sa descente. Le drone se pose et coupe les moteurs. Pendant cette phase on peut mettre les gaz à zéro. Le RTL c'est pour revenir au point d'armement des moteurs. Je fais en sorte que lors du rtl, le drone reste à 3m du sol à attendre les ordres en réglant RTL_ALT_FINAL à 300
merci JM
La vitesse de la lumière est supérieure à celle du son. C'est pourquoi, bien des gens ont l'air brillants jusqu'à ce qu'ils ouvrent la
bouche
-Phantom 1 V1.1.1 / Feiyu mini 2D / Xiaomi yi / Full FPV
-Phantom 3 Standard
-Phantom 3 Advanced
-
jmboudet
- Pilote toutes catégories
- Messages : 1472
- Enregistré le : mar. 27 oct. 2015 20:02
- Réputation : 5
- Localisation : Chatelaillon plage
- Genre :
Re: CX-20 Open-source
Joli Chris mais on sent et surtout on voit dans ta façon de piloter l'expérience des racers 
-
jmboudet
- Pilote toutes catégories
- Messages : 1472
- Enregistré le : mar. 27 oct. 2015 20:02
- Réputation : 5
- Localisation : Chatelaillon plage
- Genre :
Re: CX-20 Open-source
et surtout exactement là où tu veux... En le positionnant précisément avec Poshold avant d'enclencher le Land.nikond3 a écrit :
A...ça j'aime bien cette manip...tu le pose que quand tu le décide...!!!cool.
merci JM
-
Chris42
- Pilote toutes catégories
- Messages : 1061
- Enregistré le : mer. 2 sept. 2015 23:13
- Réputation : 0
Re: CX-20 Open-source
Ouaip ! C'est que c'est pas facile de suivre une compagnie d'oiseaux à l'écran ...jmboudet a écrit :Joli Chris mais on sent et surtout on voit dans ta façon de piloter l'expérience des racers

Héron garde-bœuf - Bubulcus ibis
http://www.futura-sciences.com/magazine ... euf-12619/" onclick="window.open(this.href);return false;
Cheerson CX20 (APM 2.8, Télémétrie, Xiaomi Yi, Walkera G2-D, FPV)
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
-
nikond3
- Quadricopter
- Messages : 299
- Enregistré le : ven. 27 nov. 2015 11:45
- Réputation : 0
- Localisation : 78550 Houdan
Re: CX-20 Open-source
Mais, on peux faire un démarrage moteur en Poshold...?
J'ai pas l'impression.
@+
J'ai pas l'impression.
@+
La vitesse de la lumière est supérieure à celle du son. C'est pourquoi, bien des gens ont l'air brillants jusqu'à ce qu'ils ouvrent la
bouche
-Phantom 1 V1.1.1 / Feiyu mini 2D / Xiaomi yi / Full FPV
-Phantom 3 Standard
-Phantom 3 Advanced
-
jmboudet
- Pilote toutes catégories
- Messages : 1472
- Enregistré le : mar. 27 oct. 2015 20:02
- Réputation : 5
- Localisation : Chatelaillon plage
- Genre :
Re: CX-20 Open-source
Je pense avoir lu que chris42 a dit que c'est possible. Mais je décolle toujours en stabilize en mettant les gaz au trois quart puis de suite je passe en poshold pour calmer le jeu; manette ramenée à 50%. Je ne vois pas trop l'intérêt de décoller en poshold.
-
thibbea

- Octocopter
- Messages : 635
- Enregistré le : lun. 30 nov. 2015 17:10
- Réputation : 1
- Localisation : Nantes
Re: CX-20 Open-source
Aucun problème pour décoller en Poshold (comme en loiter non plus), seulement ça peut surprendre car les hélices ne commence a tourner que au dessus de 50% des gaz. Le décollage dans ces modes ressemble beaucoup a un décollage auto.Chris42 a écrit : - Le décollage se fait avec une lente montée du régime des moteurs, puis à partir de 60% de gaz environ un léger bond en l'air suivi d'une montée lente,
Youtube
- Mavic Pro
- Radiolink AT9, Xiaomi Yi
- DJI F550, Pixhawk, DJI E300, HAKRC Storm32 3D, FPV
- Cheerson CX-20 Open-source, nacelle Feiyu Mini 2D, Télémétrie (+powermodule), FPV
- Eachine Falcon 250 RTF
- Eachine QX90
- Mavic Pro
- Radiolink AT9, Xiaomi Yi
- DJI F550, Pixhawk, DJI E300, HAKRC Storm32 3D, FPV
- Cheerson CX-20 Open-source, nacelle Feiyu Mini 2D, Télémétrie (+powermodule), FPV
- Eachine Falcon 250 RTF
- Eachine QX90
-
Chris42
- Pilote toutes catégories
- Messages : 1061
- Enregistré le : mer. 2 sept. 2015 23:13
- Réputation : 0
Re: CX-20 Open-source
J'aime bien le décollage en PosHold parce qu'en montant les gaz les moteurs démarrent doucement à la différence du Stabilize, parce que le bond du démarrage se fait automatiquement et toujours de la même manière, et enfin parce que pour la suite du vol je suis tout de suite dans le bon mode et avec les manettes bien positionnées. Autrement dit, avec le décollage en Poshold c'est la fin du stress du décollage (et idem pour l'atterrissage qui est beaucoup plus doux).jmboudet a écrit :Je pense avoir lu que chris42 a dit que c'est possible. Mais je décolle toujours en stabilize en mettant les gaz au trois quart puis de suite je passe en poshold pour calmer le jeu; manette ramenée à 50%. Je ne vois pas trop l'intérêt de décoller en poshold.
On peut armer en Poshold, à condition d'avoir un HDOP inférieur à la valeur de GPS_HDOP_GOOD (alors que pour armer en Stabilize il suffit de capter un certain nombre de sats, déterminé par la valeur de AHRS_GPS_MINSATS).nikond3 a écrit :Mais, on peux faire un démarrage moteur en Poshold...? J'ai pas l'impression. @+
Ensuite il faut monter les gaz au-delà du point neutre de la radio-commande : lors de la montée des gaz en version 3.2.1 les moteurs commencent à tourner doucement dès le début, puis le régime des moteurs monte progressivement jusqu'à 60% environ, pour accélérer fortement pour le bond du décollage (à la différence d'un décollage en Loiter en version 3.1.2 où il n'y a pas cette montée progressive du régime des moteurs).
Cheerson CX20 (APM 2.8, Télémétrie, Xiaomi Yi, Walkera G2-D, FPV)
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
-
David

- Pilote toutes catégories
- Messages : 5563
- Enregistré le : ven. 31 juil. 2015 11:36
- Réputation : 5
- Localisation : Lyon
- Genre :
Re: CX-20 Open-source
Je crois qu'un descriptif du PosHold va s’insérer dans le Tuto (?)
@Chris :
Dégoutté Chris pour ton Multi. C'est pas cool comme crash.
Ne rien pouvoir faire, sa dégoutte bien.

Je suis d'accord avec JM sur le coté pilotage. Cela se voit que tu es passé sur un Racer. Tu as changé ta façon de faire.
@Chris :
Dégoutté Chris pour ton Multi. C'est pas cool comme crash.
Ne rien pouvoir faire, sa dégoutte bien.
Je suis d'accord avec JM sur le coté pilotage. Cela se voit que tu es passé sur un Racer. Tu as changé ta façon de faire.
Le savoir est une Arme. Et je sort toujours armé.
DAVID
DAVID
-
Chris42
- Pilote toutes catégories
- Messages : 1061
- Enregistré le : mer. 2 sept. 2015 23:13
- Réputation : 0
Re: CX-20 Open-source
1 - Ça serait pas mal en effet.David a écrit : 1 - Je crois qu'un descriptif du PosHold va s’insérer dans le Tuto (?)
2 - Je suis d'accord avec JM sur le coté pilotage. Cela se voit que tu es passé sur un Racer. Tu as changé ta façon de faire.
Si aujourd'hui je devais faire un tuto de prise en main, il aurait ces grandes lignes :
- Faire la calibration de la radio-commande comme indiqué dans la notice
- Installer MP, connecter, installer le FW 3.2.1 custom puis modifier le INS_MPU6K_FILTER à 20
- Paramétrer ses modes de vols préférés en gardant Stabilize + RTL + PosHold à la place de Loiter, et en décochant les modes simples.
- Faire avec MP les calibrations de la radio-commande, du compas et de l'accéléromètre
Epicétout !
2 - Ah toi aussi tu vois ça ?
Je pense plutôt que c'est parce que je suivais les oiseaux à l'écran FPV, et aussi à cause de ma config (poids + hélices + batterie).
Les 2 fortes inclinaisons au début ce n'est pas le quad, mais uniquement la caméra, je pense que c'est du au câble de la nacelle empêtré.
Cheerson CX20 (APM 2.8, Télémétrie, Xiaomi Yi, Walkera G2-D, FPV)
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
Hexa H550 (moteurs-hélices CX20, RC-RX CX20, Pixhawk, Télémétrie, Sonar Maxbotix EZ4, batt.3S et 4S)
Eachine Racer 250 (RC-RX CX20, batt.3S CX20, Foxeer Legend 1)
Xiaomi Fimi X8 SE
-
JeeAiif
- Octocopter
- Messages : 581
- Enregistré le : lun. 28 déc. 2015 16:25
- Réputation : 0
- Localisation : lyon
Re: CX-20 Open-source
on dirait un documentaire animalier ça rends pas mal.
Pour le tuto j'en reviens a la discussion qu'il y avait déjà eu ici,cela fait un gros pavé pour celui qui arrive en terre inconnu.
J'aurai plus vu tout cela découpé en plusieurs thread (calibrations,paramètres,nacelles,camera,telemetrie,OSD,problèmes/solutions,etc..).
Après c'est déjà très bien ce tuto ,merci d’ailleurs a David de le gérer,il a du en sortir pas mal du pétrin
Pour le tuto j'en reviens a la discussion qu'il y avait déjà eu ici,cela fait un gros pavé pour celui qui arrive en terre inconnu.
J'aurai plus vu tout cela découpé en plusieurs thread (calibrations,paramètres,nacelles,camera,telemetrie,OSD,problèmes/solutions,etc..).
Après c'est déjà très bien ce tuto ,merci d’ailleurs a David de le gérer,il a du en sortir pas mal du pétrin