ROV ou l'immersion en immersion
Posté : lun. 27 juin 2016 19:26
Salut, je vous fais le topo d'un projet démarré chez multivoltige, en cours de finalisation.
Pour mon plus grand malheur, mon cerveau me torture une fois de plus. J'ai fait de l'immersion en avion, en quad, en voiture, pas d'hélico, je fais un blocage, mais j'ai pas mal de lacs autour de moi, et je suis un fan des vacances en bord de mer, le pied serait de pouvoir plonger et d'immerger l'immersion depuis les rochers ou la plage.
Je fais un peu de snorking et je me suis équipé du masque grand angle de decathlon, très sympa mais très limitatif, quand aux bouteilles, asmathique, elles me sont fortement déconseillées surtout audela de 3m.
Donc j'ai commencer à creuser le sujet.
et j'ai trouvé ça

http://www.thundertiger.com/products-detail.php?id=42" onclick="window.open(this.href);return false;
Mais ca pique un peu pour une decouverte, puis on fait des images pas de l'immersion, et la radio on oublie le 2.4 sinon ça passe pas dans l'eau.
Alors on pense au ROV

Mais il y a un pbm de taille, l'ombilic, le cable qui relie le ROV à la base. c'est pas très "liberté" ça.
et je tombe sur ce gars
Il utilise le fameux Thundertiger, il lui ajoute un ombilic pour le retour vidéo, et surtout, il installe tout le systeme radio et vidéo en surface sur un flotteur, sa machine peu servir de support d'immersion sous marin sans que le câble ne le limite si ce n'est pour la plongée. reste que le prix du thunder ,n'a pas changé et que le rtf quand je peux j'évite.
Je veux une machine capable de descendre entre 9 et 10 mètres, et entièrement libre d'évoluer loin de l'opérateur
Retour donc sur le ROV, mais homemade, avec du drone staging (neologisme issu de home staging)
Le modele de chassis sera celui là

La motorisation je l'ai repiquée chez openrov
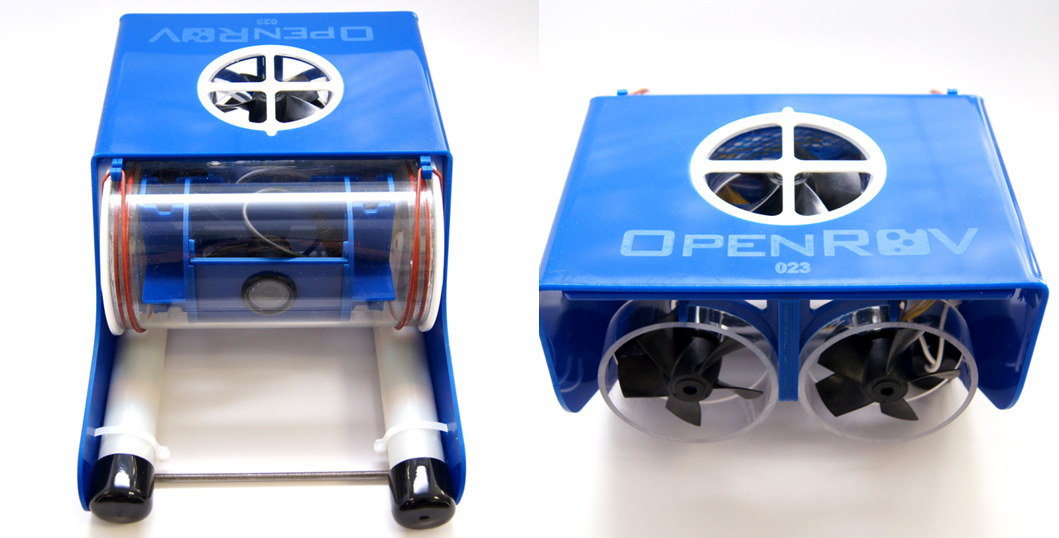
le combo moteur hélice sur ce modèle
J'ai retenu le ntm 2830 800 kv proche de celui présenté dans la vidéo et l'hélice de la turbine edf delta v15.

la liste de course est donc la suivante
PVC tubes, coudes et tés en 32 et 80 bricotruc
3 NTM 2830 800kv réserve personnelle
3 hélices delta v15 de chez milleniul modelisme
3 esc littlebee 20A flashés en 3D réserve personnelle
1 lipo 2s 5400 mah réserve personnelle
1 cable blindé étanche 4 brins 12m de chez snooperworld
1 sbus to pwm encoder et un channel changer de chez flash rc
1 d8r2 reserve personnelle
1 vtx imrc 600 mw réserve personnelle
1 gopro réserve personnelle
1 boitier gopro aménagé FPV réserve personnelle
2 torche sous marine 1800 lumens Amazon
Le ROV utilisera la technique de la "flotabilité nulle" qui consiste a équilibrer la machine de facon a ce qu'elle reste à la profondeur ou on la place, ce système est plus simple que l'utilisation de ballasts et d'un compresseur, dans les faits on l'équilibre légèrement flottant pour qu'en cas de panne la machine remonte seule.
Ce post fait suite à une discussion très fructueuse avec Foxxy, "Redendum est Caesari quod est Caesaris , et Deo quod est Dei" ne vous fatiguez pas, il m'a deja dit que je m'étais embarqué dans un truc de dingue.
De cette discussion a surgit
1 le cable blindé pour faire voyager le signal audio et video jusqu'a 10m de profondeur
2 les moteurs brushed et non brushless, mais des brushless j'en ai deja alors je vais les essayer et on verra le brushed plus tard.
3 la dificulté d'étanchéifier l'électronique jusqu'a 10m, à 2 atmosphère, les tests en eau libre valideront la magic gel
4 Le choix de la lipo en 2s tant que je n'ai pas vérifié la consommation du 800kv dans l'eau, et pour éviter la cavitation si l'hélice tourne trop vite, idéalement il serait bien de passer sur des accus plus simples d'utilisation comme ceux ci
http://www.banggood.com/4PCS-3_7V-2600m ... 13785.html
plus faciles à intégrer c'est la conso des moteurs qui en décidera.
Je vous tease la version 2 déja à l'étude.
Bras pour travaux sub
double optique pour vision 3D
Le chassis est encours de preparation, c'est pas simple parceque je n'ai aucune cote, je dois extrapoler la meilleure position pour tout les element tout en essayant de pas en faire un sous marin taille réelle !!!
Des photos des que j'aurais fini le montage à blanc !!!
Le montage a blanc est presque terminé, j'attends les hélices pour valider le montage des tuyères.

Ok ce matin flashage des esc en 3d pour l'inversion de poussée,
Etape suivante préparation des 2 tuyeres restantes
dans la foulée taillage de 3 hélices tripales 10x6 en 7x6
Achat de raytech gel pour l'étanchéité
1 un tupperware avec joint et verrouillage
2 immersion dans du raytech

Voici une premiere turbine

Va falloir poncer et coller tout ça
Isolation électrique !!!
Allez on se jette à l'eau !!!
Bon un problème d’étanchéité du compartiment batterie et du compartiment vidéo (c'est pour ca qu'il coule des la mise en eau) va m'obliger à repenser la disposition, mais le principe fonctionne, malgré les hélices bidouillées, ca va être une tuerie avec les e-turbines !!!
Pour mon plus grand malheur, mon cerveau me torture une fois de plus. J'ai fait de l'immersion en avion, en quad, en voiture, pas d'hélico, je fais un blocage, mais j'ai pas mal de lacs autour de moi, et je suis un fan des vacances en bord de mer, le pied serait de pouvoir plonger et d'immerger l'immersion depuis les rochers ou la plage.
Je fais un peu de snorking et je me suis équipé du masque grand angle de decathlon, très sympa mais très limitatif, quand aux bouteilles, asmathique, elles me sont fortement déconseillées surtout audela de 3m.
Donc j'ai commencer à creuser le sujet.
et j'ai trouvé ça
http://www.thundertiger.com/products-detail.php?id=42" onclick="window.open(this.href);return false;
Mais ca pique un peu pour une decouverte, puis on fait des images pas de l'immersion, et la radio on oublie le 2.4 sinon ça passe pas dans l'eau.
Alors on pense au ROV
Mais il y a un pbm de taille, l'ombilic, le cable qui relie le ROV à la base. c'est pas très "liberté" ça.
et je tombe sur ce gars
Il utilise le fameux Thundertiger, il lui ajoute un ombilic pour le retour vidéo, et surtout, il installe tout le systeme radio et vidéo en surface sur un flotteur, sa machine peu servir de support d'immersion sous marin sans que le câble ne le limite si ce n'est pour la plongée. reste que le prix du thunder ,n'a pas changé et que le rtf quand je peux j'évite.
Je veux une machine capable de descendre entre 9 et 10 mètres, et entièrement libre d'évoluer loin de l'opérateur
Retour donc sur le ROV, mais homemade, avec du drone staging (neologisme issu de home staging)
Le modele de chassis sera celui là
La motorisation je l'ai repiquée chez openrov
le combo moteur hélice sur ce modèle
J'ai retenu le ntm 2830 800 kv proche de celui présenté dans la vidéo et l'hélice de la turbine edf delta v15.
la liste de course est donc la suivante
PVC tubes, coudes et tés en 32 et 80 bricotruc
3 NTM 2830 800kv réserve personnelle
3 hélices delta v15 de chez milleniul modelisme
3 esc littlebee 20A flashés en 3D réserve personnelle
1 lipo 2s 5400 mah réserve personnelle
1 cable blindé étanche 4 brins 12m de chez snooperworld
1 sbus to pwm encoder et un channel changer de chez flash rc
1 d8r2 reserve personnelle
1 vtx imrc 600 mw réserve personnelle
1 gopro réserve personnelle
1 boitier gopro aménagé FPV réserve personnelle
2 torche sous marine 1800 lumens Amazon
Le ROV utilisera la technique de la "flotabilité nulle" qui consiste a équilibrer la machine de facon a ce qu'elle reste à la profondeur ou on la place, ce système est plus simple que l'utilisation de ballasts et d'un compresseur, dans les faits on l'équilibre légèrement flottant pour qu'en cas de panne la machine remonte seule.
Ce post fait suite à une discussion très fructueuse avec Foxxy, "Redendum est Caesari quod est Caesaris , et Deo quod est Dei" ne vous fatiguez pas, il m'a deja dit que je m'étais embarqué dans un truc de dingue.
De cette discussion a surgit
1 le cable blindé pour faire voyager le signal audio et video jusqu'a 10m de profondeur
2 les moteurs brushed et non brushless, mais des brushless j'en ai deja alors je vais les essayer et on verra le brushed plus tard.
3 la dificulté d'étanchéifier l'électronique jusqu'a 10m, à 2 atmosphère, les tests en eau libre valideront la magic gel
4 Le choix de la lipo en 2s tant que je n'ai pas vérifié la consommation du 800kv dans l'eau, et pour éviter la cavitation si l'hélice tourne trop vite, idéalement il serait bien de passer sur des accus plus simples d'utilisation comme ceux ci
http://www.banggood.com/4PCS-3_7V-2600m ... 13785.html
plus faciles à intégrer c'est la conso des moteurs qui en décidera.
Je vous tease la version 2 déja à l'étude.
Bras pour travaux sub
double optique pour vision 3D
Le chassis est encours de preparation, c'est pas simple parceque je n'ai aucune cote, je dois extrapoler la meilleure position pour tout les element tout en essayant de pas en faire un sous marin taille réelle !!!
Des photos des que j'aurais fini le montage à blanc !!!
Le montage a blanc est presque terminé, j'attends les hélices pour valider le montage des tuyères.

Ok ce matin flashage des esc en 3d pour l'inversion de poussée,
Etape suivante préparation des 2 tuyeres restantes
dans la foulée taillage de 3 hélices tripales 10x6 en 7x6
Achat de raytech gel pour l'étanchéité
1 un tupperware avec joint et verrouillage
2 immersion dans du raytech
Voici une premiere turbine

Va falloir poncer et coller tout ça
Isolation électrique !!!
Allez on se jette à l'eau !!!
Bon un problème d’étanchéité du compartiment batterie et du compartiment vidéo (c'est pour ca qu'il coule des la mise en eau) va m'obliger à repenser la disposition, mais le principe fonctionne, malgré les hélices bidouillées, ca va être une tuerie avec les e-turbines !!!





