
Suite du projet AutoQuad avec le contrôleur de vol M4:
http://www.helicomicro.com/autoquad-m4/" onclick="window.open(this.href);return false;
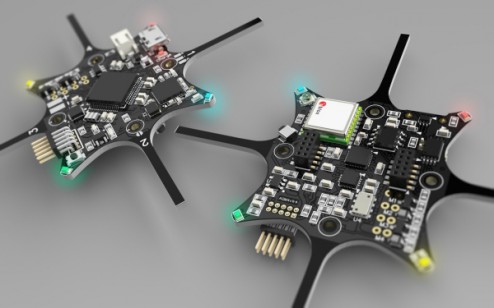
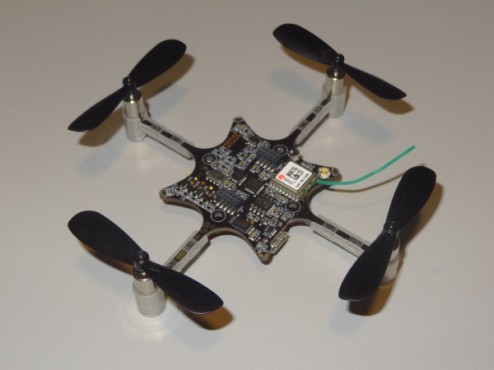
Le site officiel d'AutoQuad: http://autoquad.org/" onclick="window.open(this.href);return false;Les dimensions de la carte électronique ne seraient pas exceptionnelles si on en restait là. Mais le contrôleur de vol M4 inclut aussi un CAN bus, un GPS Ublox et des capteurs sur 9 axes incluant un altimètre. A cela s’ajoute un récepteur radio 2,4 GHz de technologie DSM2, un connecteur USB pour assurer la charge d’une batterie Lipo 1S, un bouton d’allumage et d’extinction et un connecteur d’extension pour des composants supplémentaires. Et décrypté, ça donne quoi ? Le M4 est capable de stabiliser un multirotor comme les petits appareils du marché actuels, mais il ajoute un contrôle de la hauteur (comme les engins de chez Parrot) et, c’est beaucoup plus fort, une position GPS (en extérieur). Ce qui lui permet d’envisager toutes les fonctions normalement réservées à des appareils de plus grande taille : l’IOC (orientation « intelligente »), le RTH (retour au point de départ), le stationnaire automatique à une position déterminée… La bonne nouvelle, c’est que le tout est déjà opérationnel sur des appareils de la taille d’un Ladybird. Cela constitue ni plus ni moins qu’une étape majeure dans le petit monde des mini multirotors !
Qu'en pensez-vous?
À bientôt!
Alextotor88


